SEW MOVIDRIVE MDX61B调试步骤
通用配置
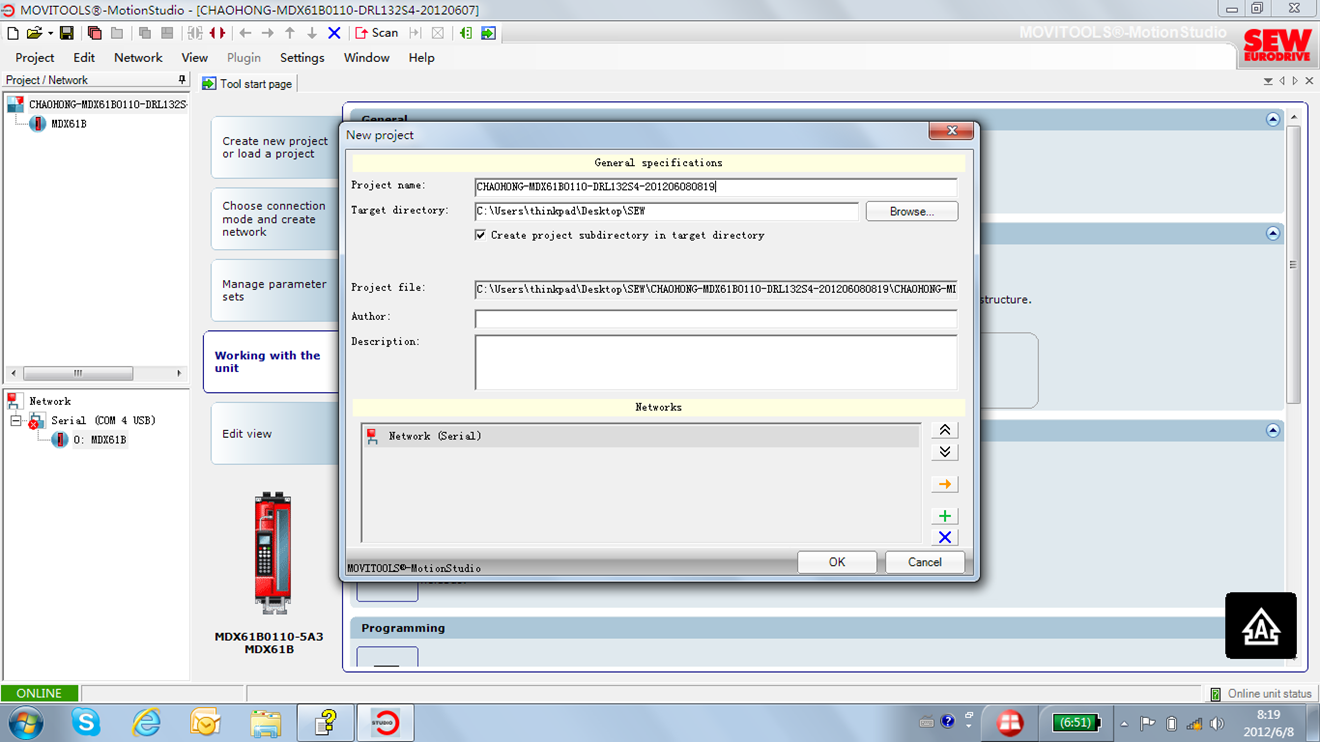
1、打开MOVITOOLS MotionStudio软件,创建项目;
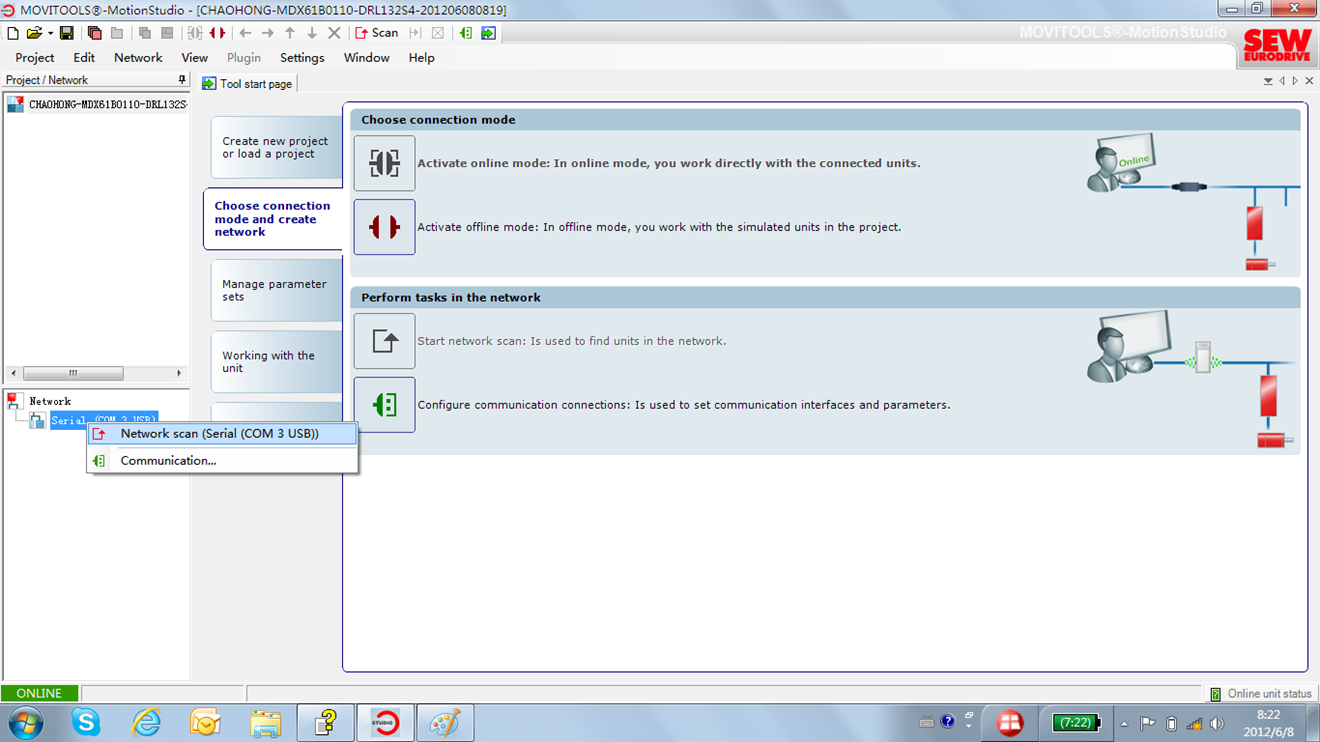
2、用USB11A连接电脑和MDX61B控制器的XT插槽,扫描网络上的设备;
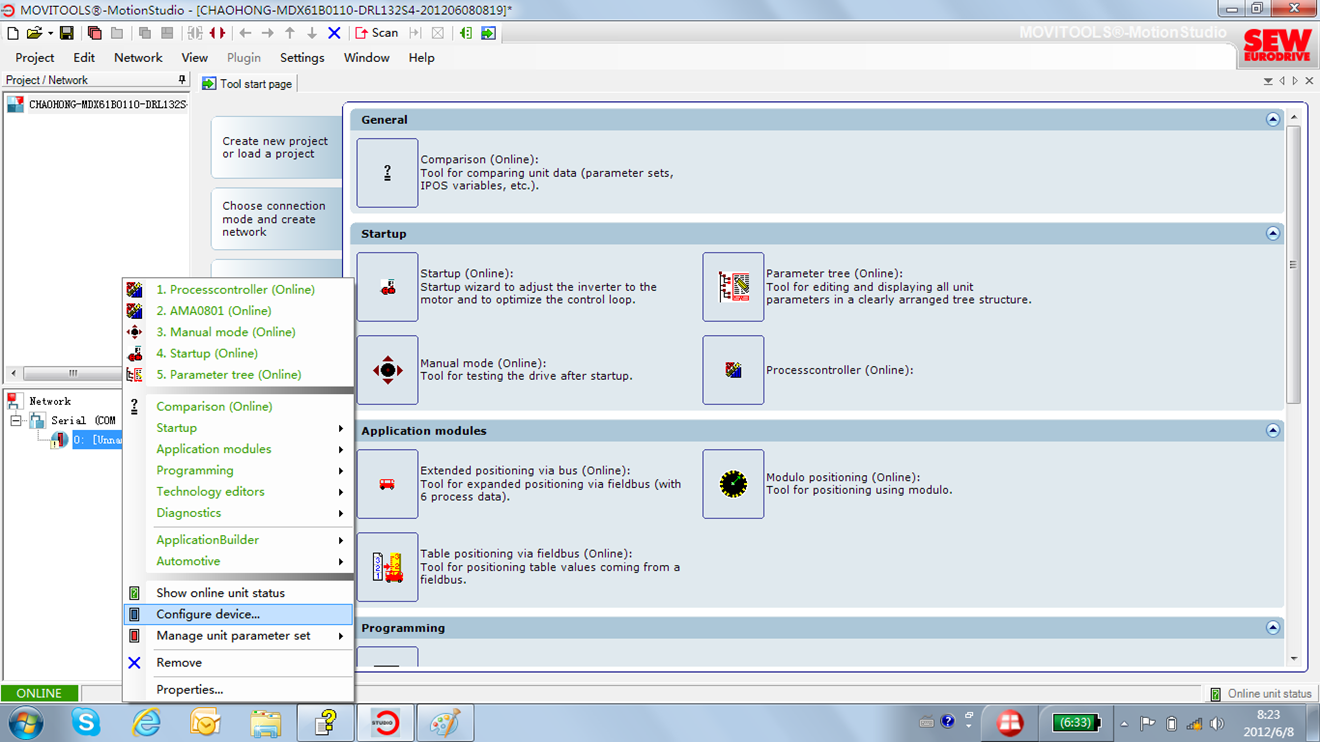
3、选择“configure device”,对连接到的设备进行硬件配置;
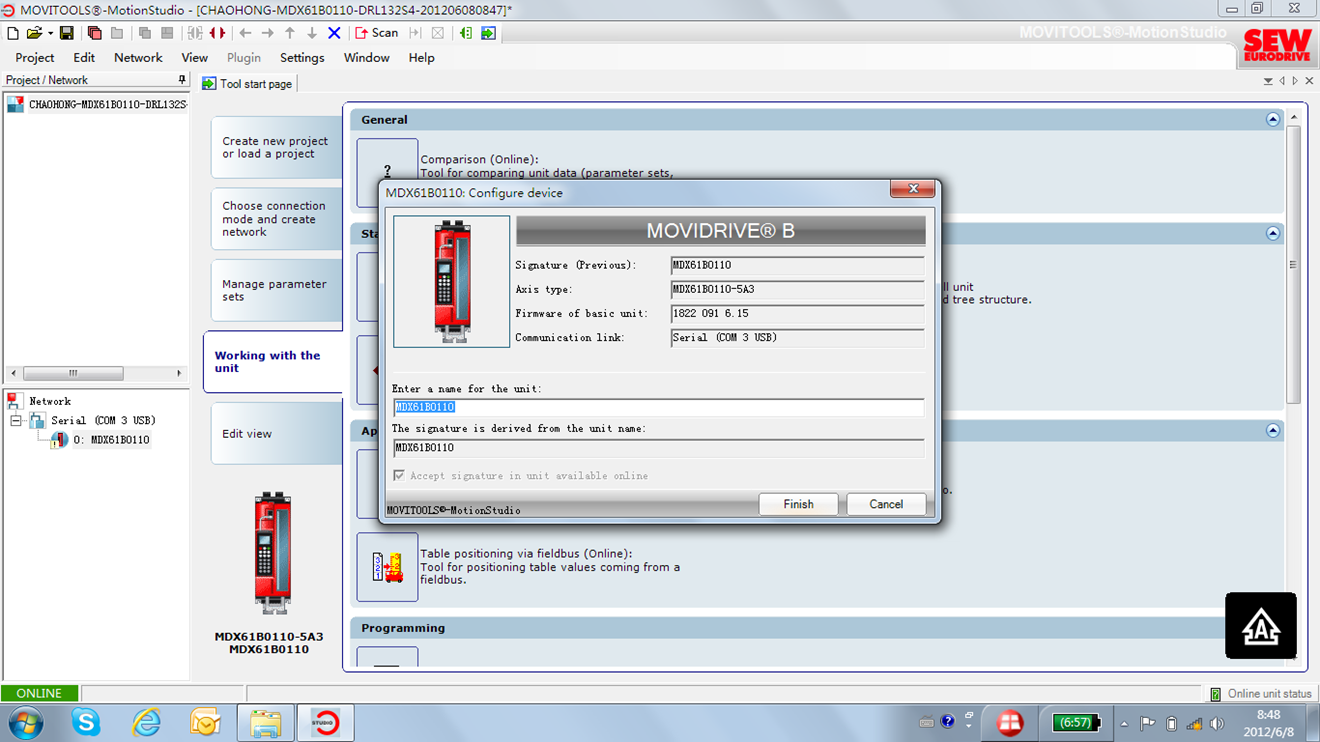
4、定义硬件名称,点击“finish”开始硬件配置;
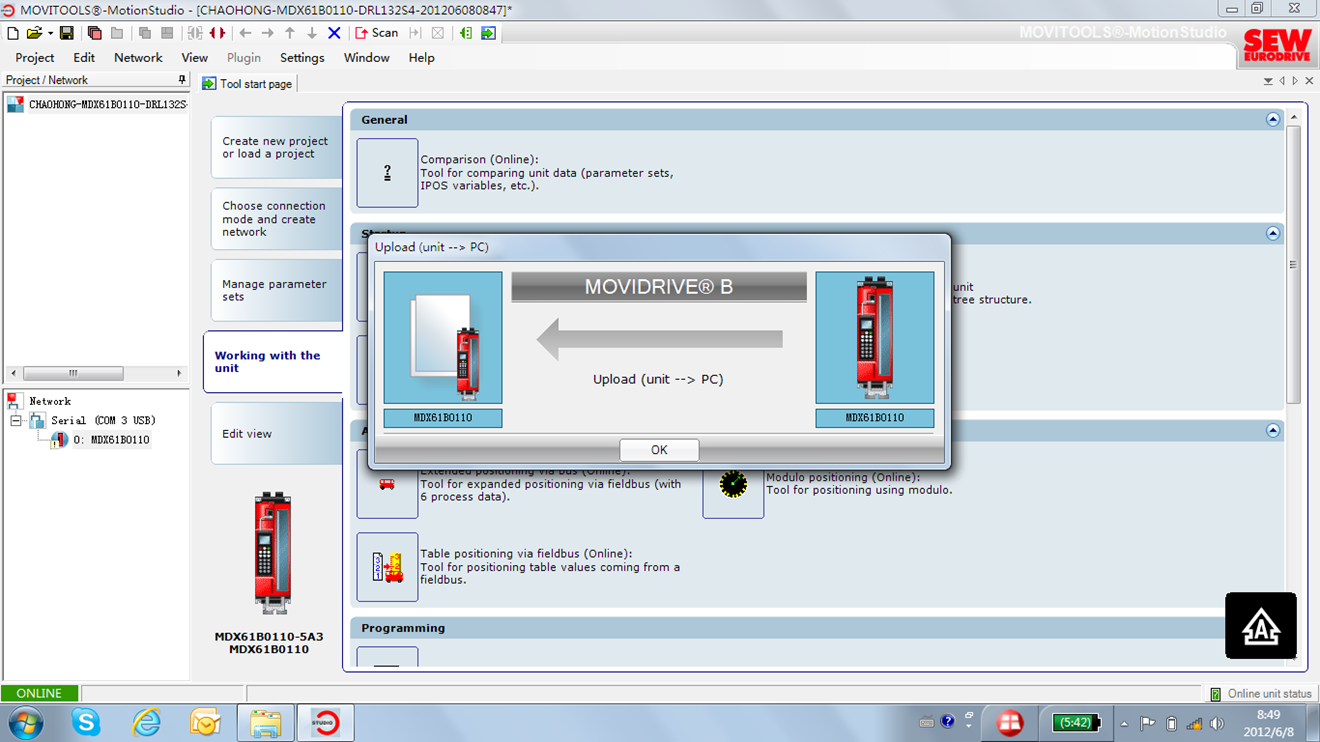
5、硬件配置中;
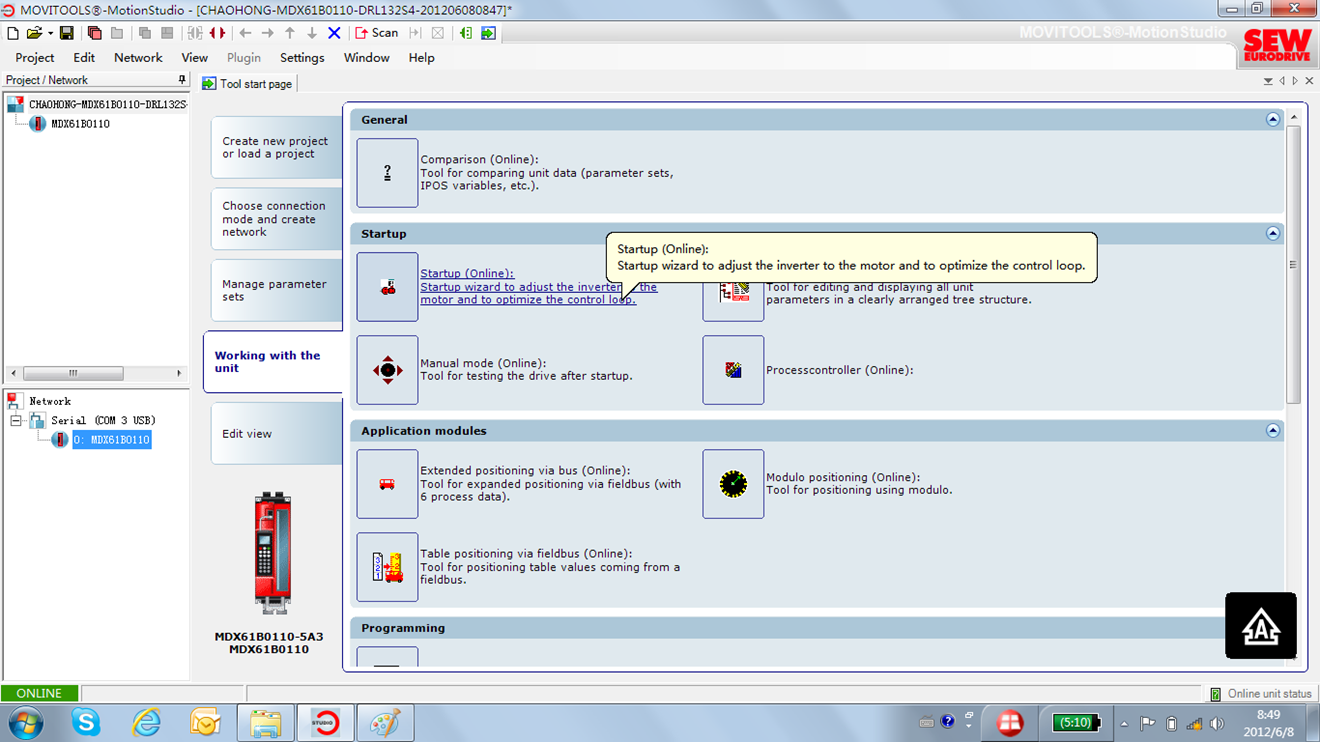
6、硬件配置完成后,去除控制器X13/DIΦΦ“控制器禁止”端子的二进制输入,然后点击“startup”;
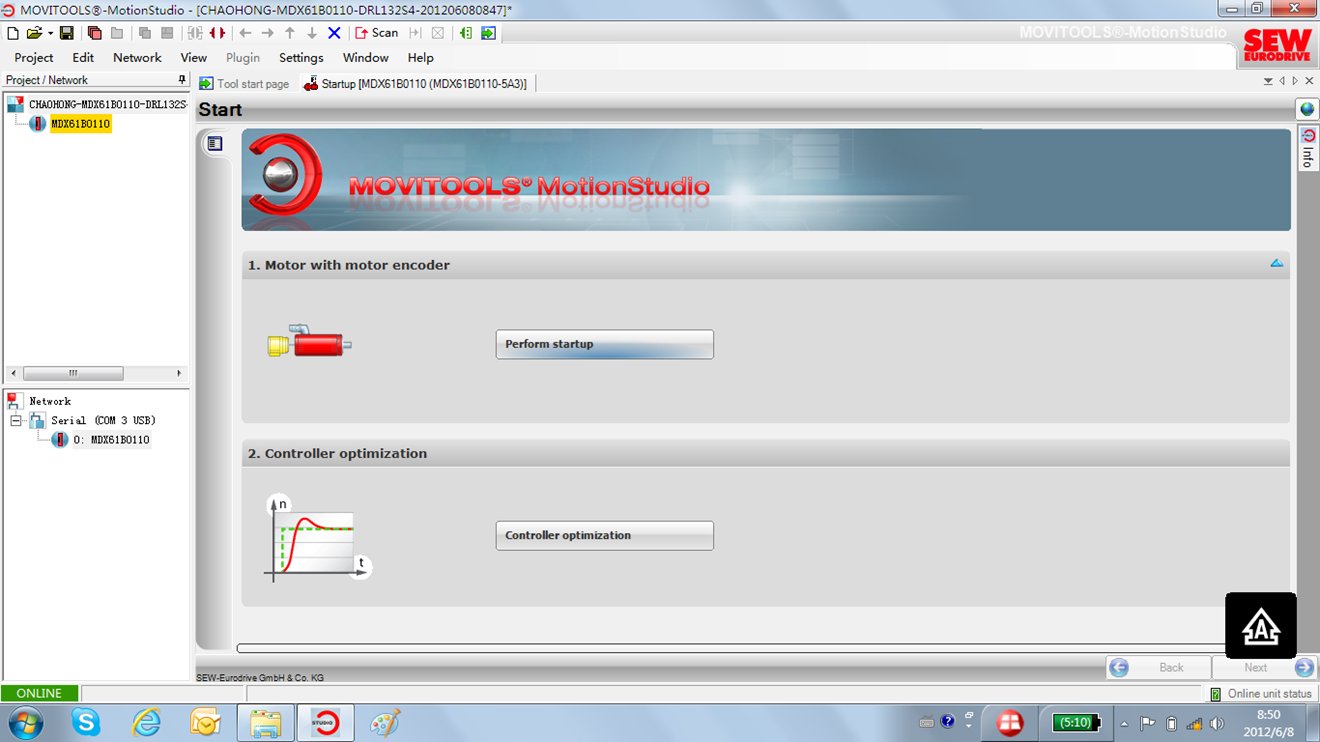
7、点击“perform startup”,开始初始化;
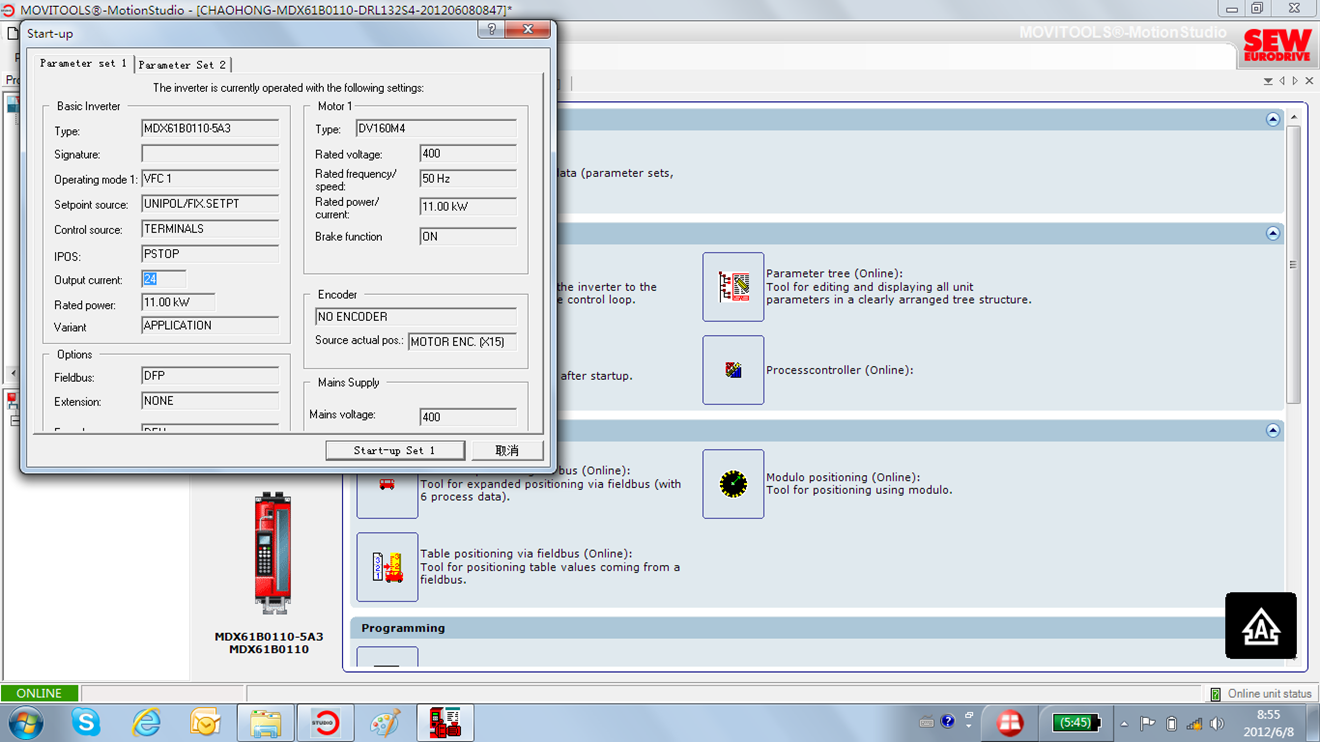
8、点击“startup set-1”,进行parameter set-1设置( 如果需要两套参数运行,parameter set-2设置采取同样步骤);
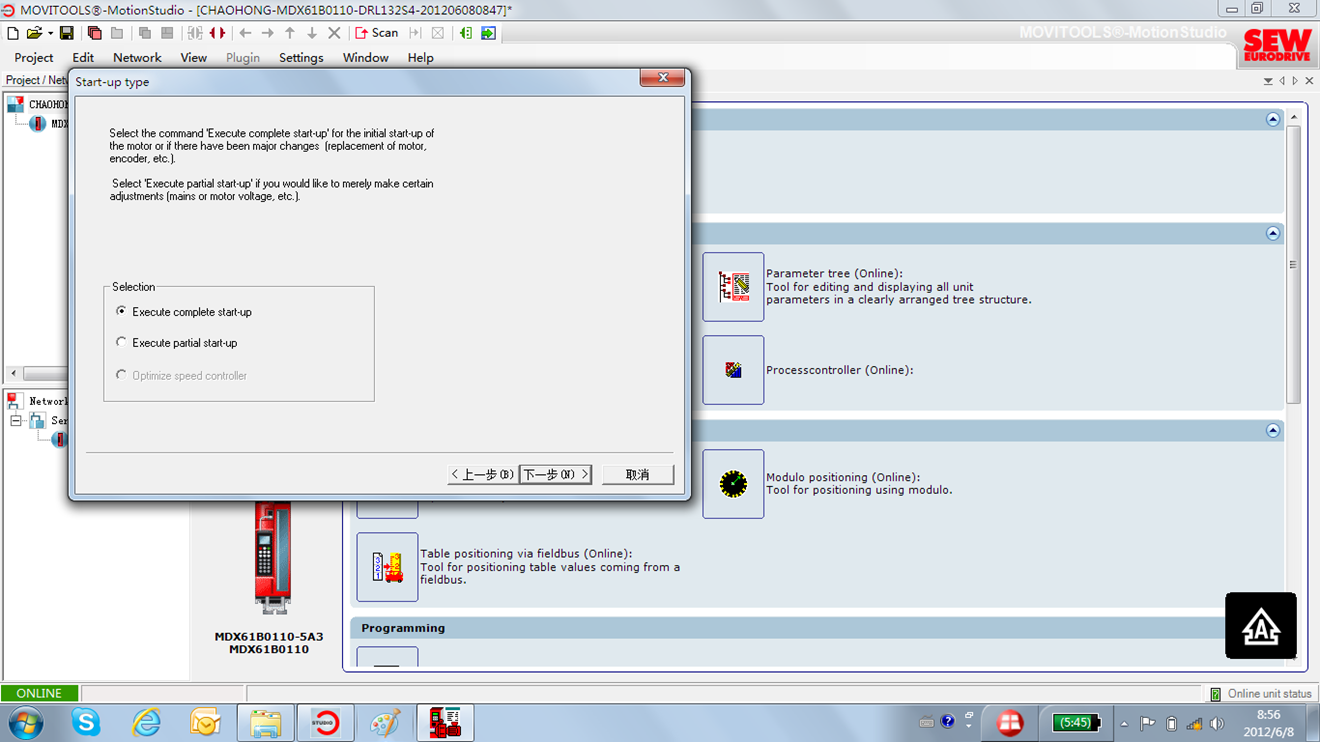
9、选择“Execute complete start-up(执行完整的初始化)”;
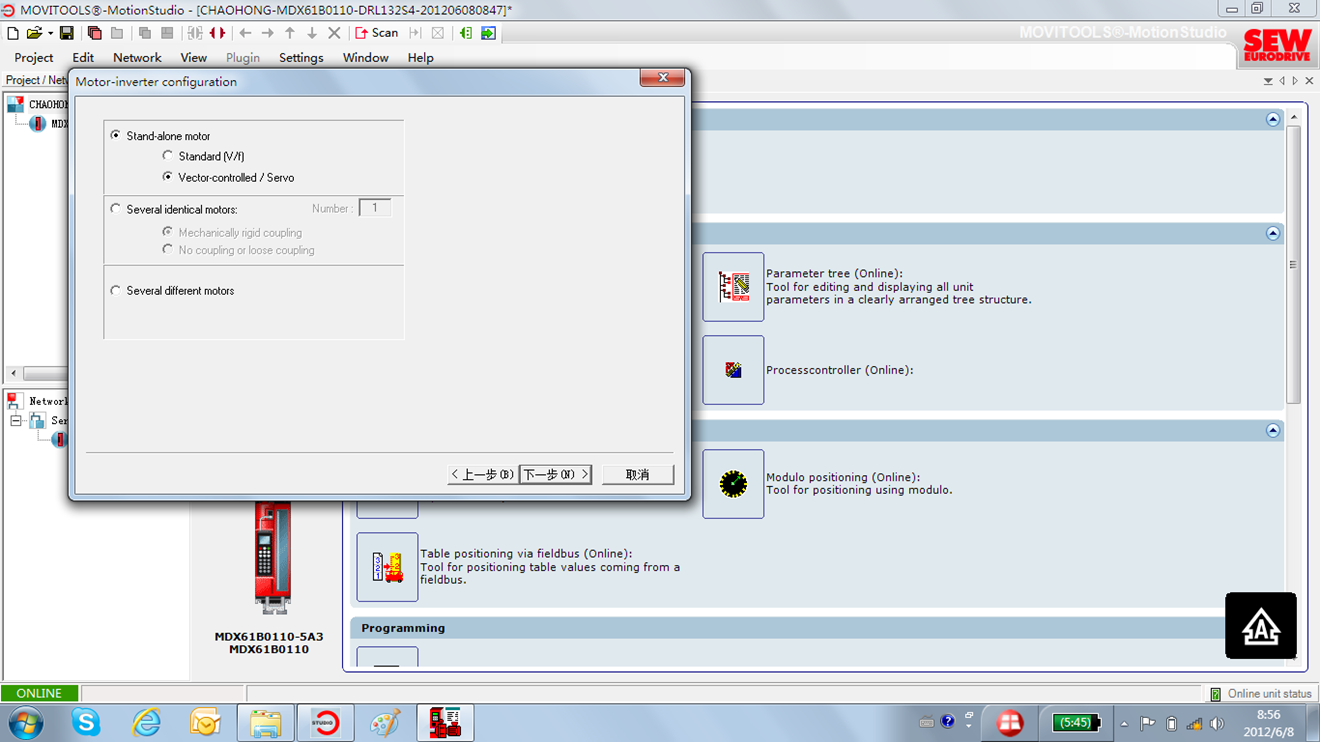
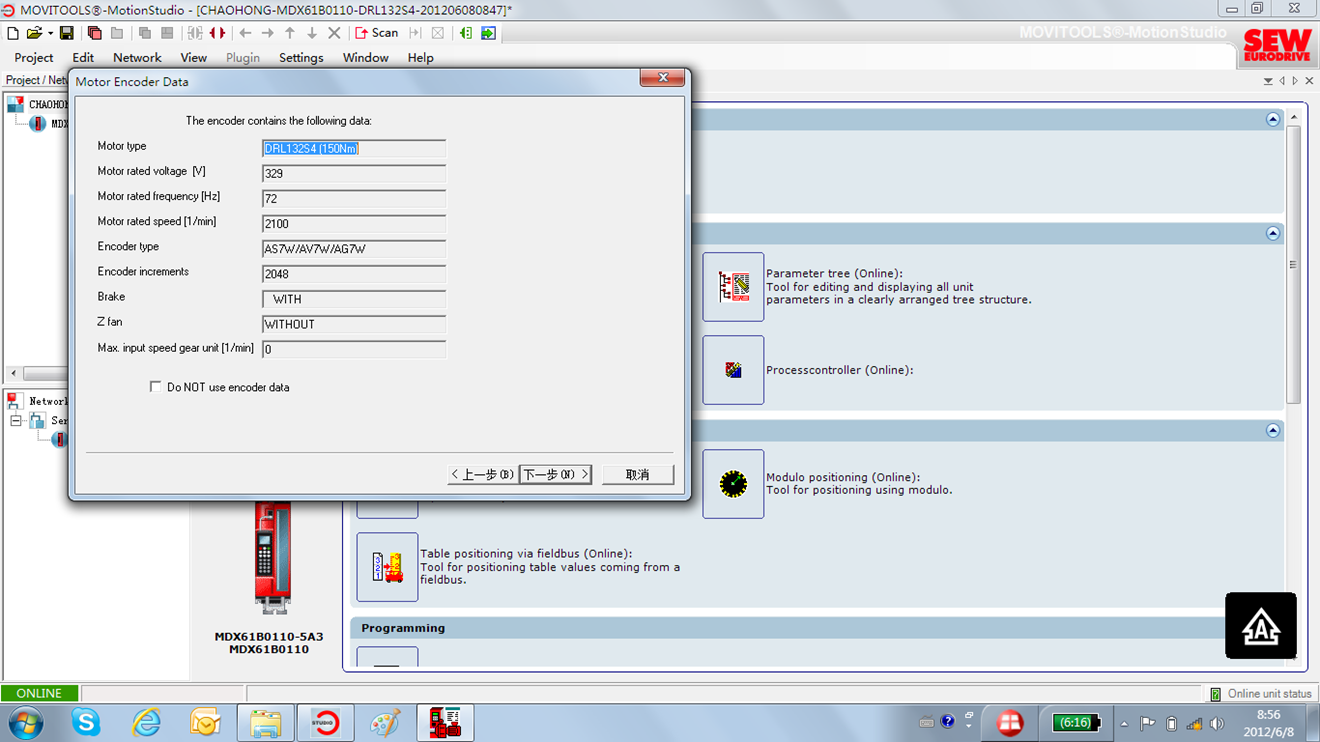
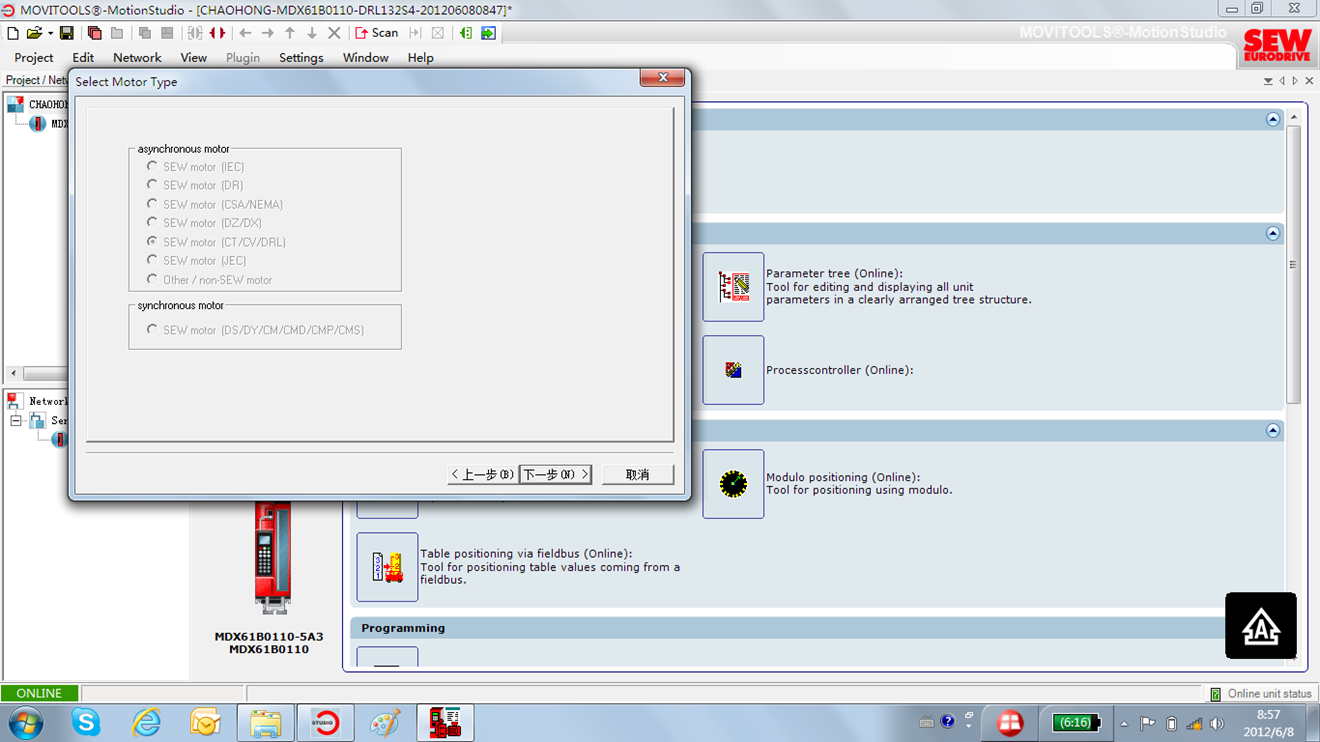
10、选择“Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量控制/伺服电机)”;
11、参照电机铭牌,检查电机及编码器信息是否准确;
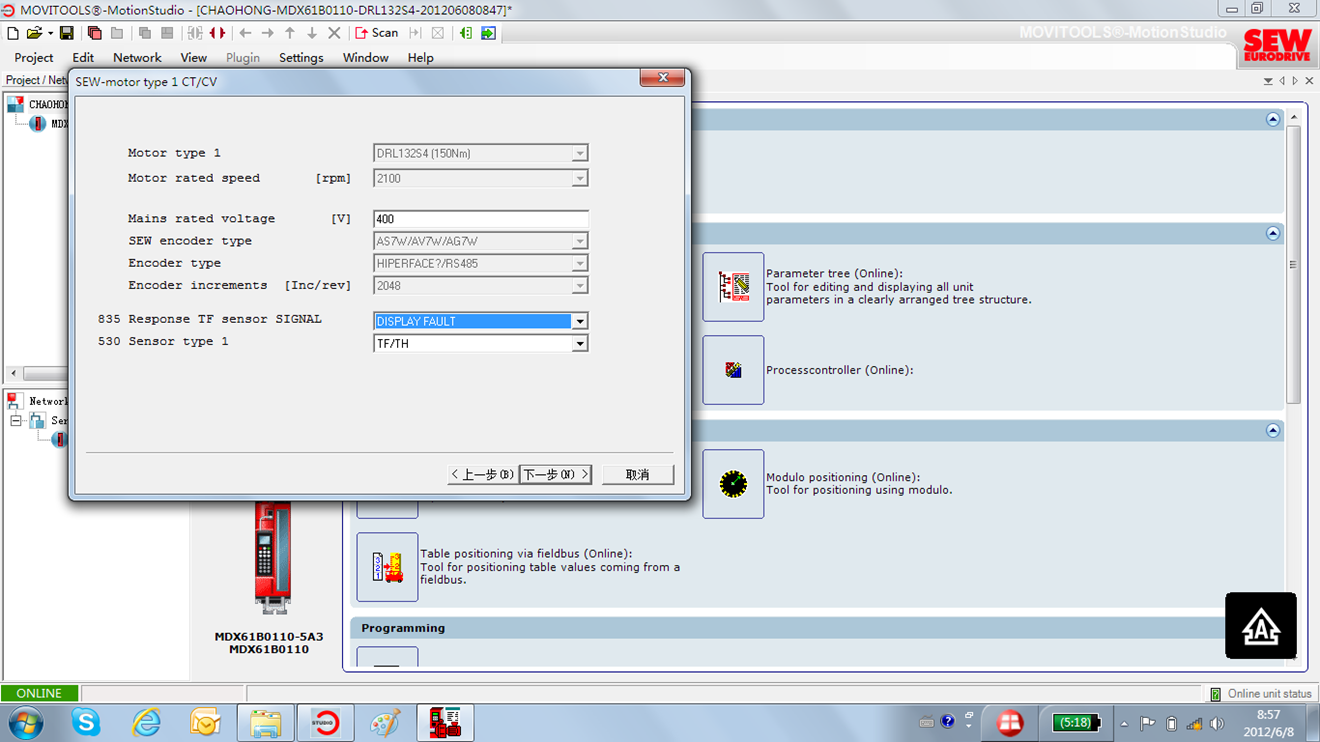
12、检查电机类型信息;
13、输入电源电压,定义参数P835“电机温度传感器的响应”,定义参数P530“电机温度传感器类型”(例如TF/TH);
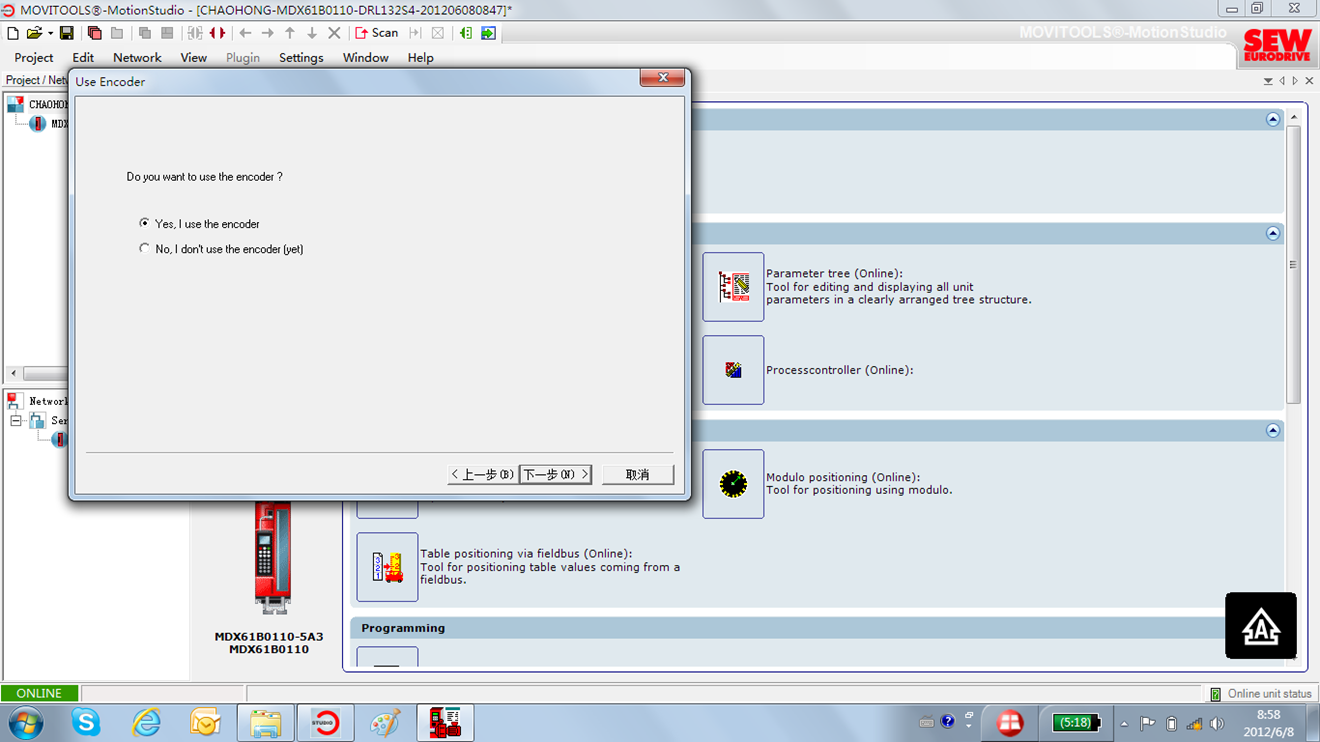
14、选择“Yes, I use the encoder.(使用编码器)”;
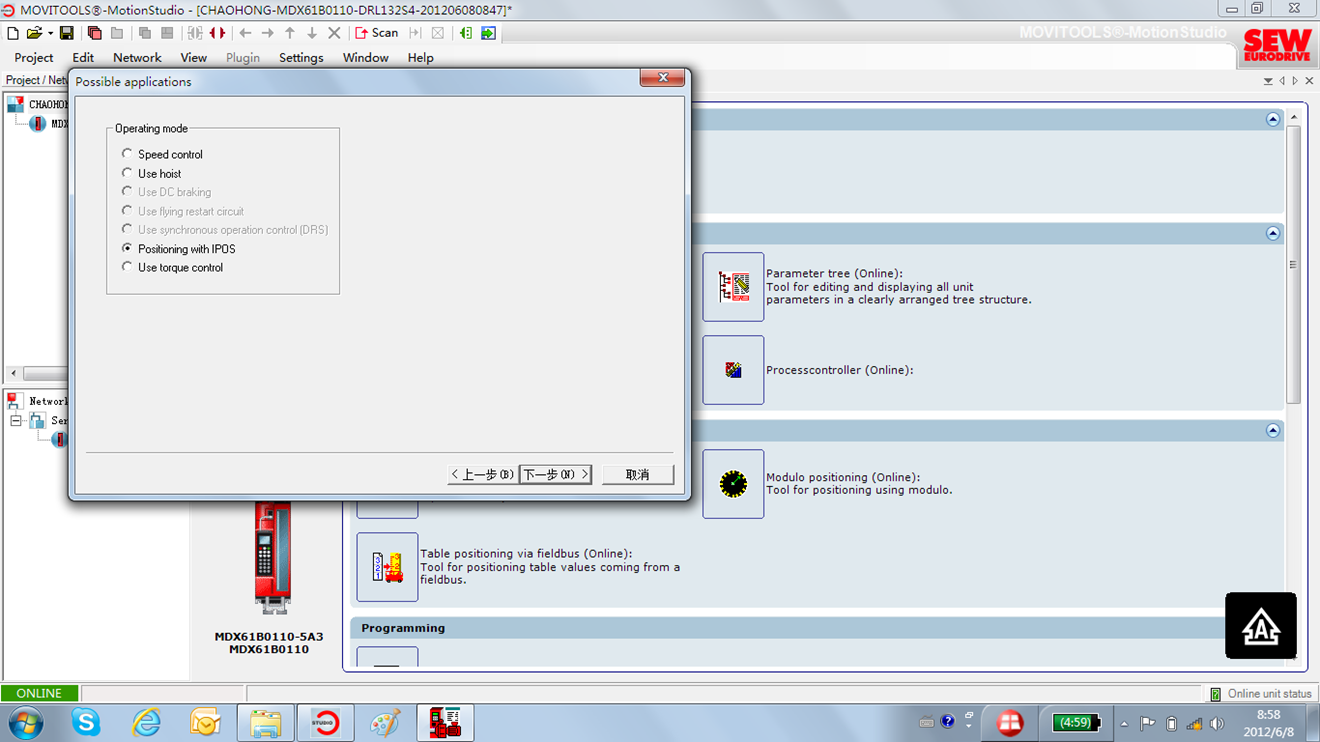
15、操作模式选择“Positioning with IPOS(IPOS程序定位模式)”;
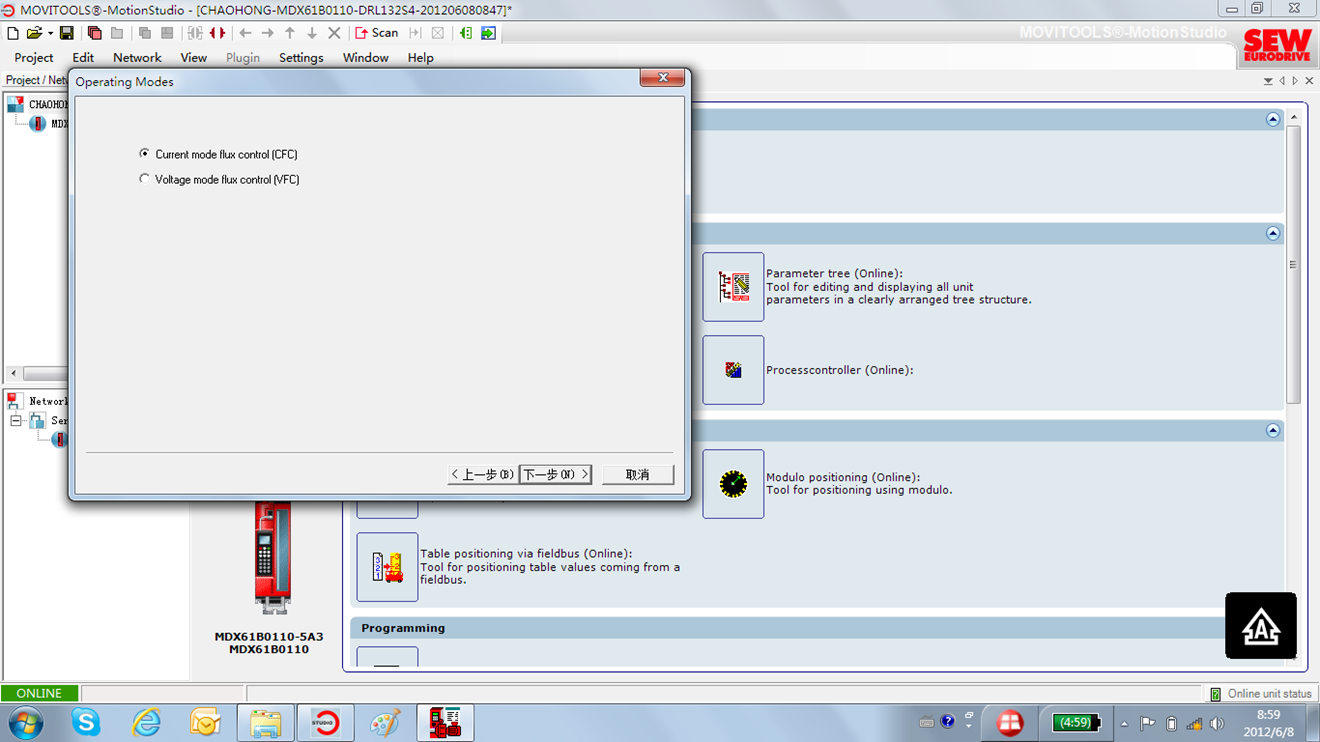
16、选择“CFC(电流矢量控制)模式”;
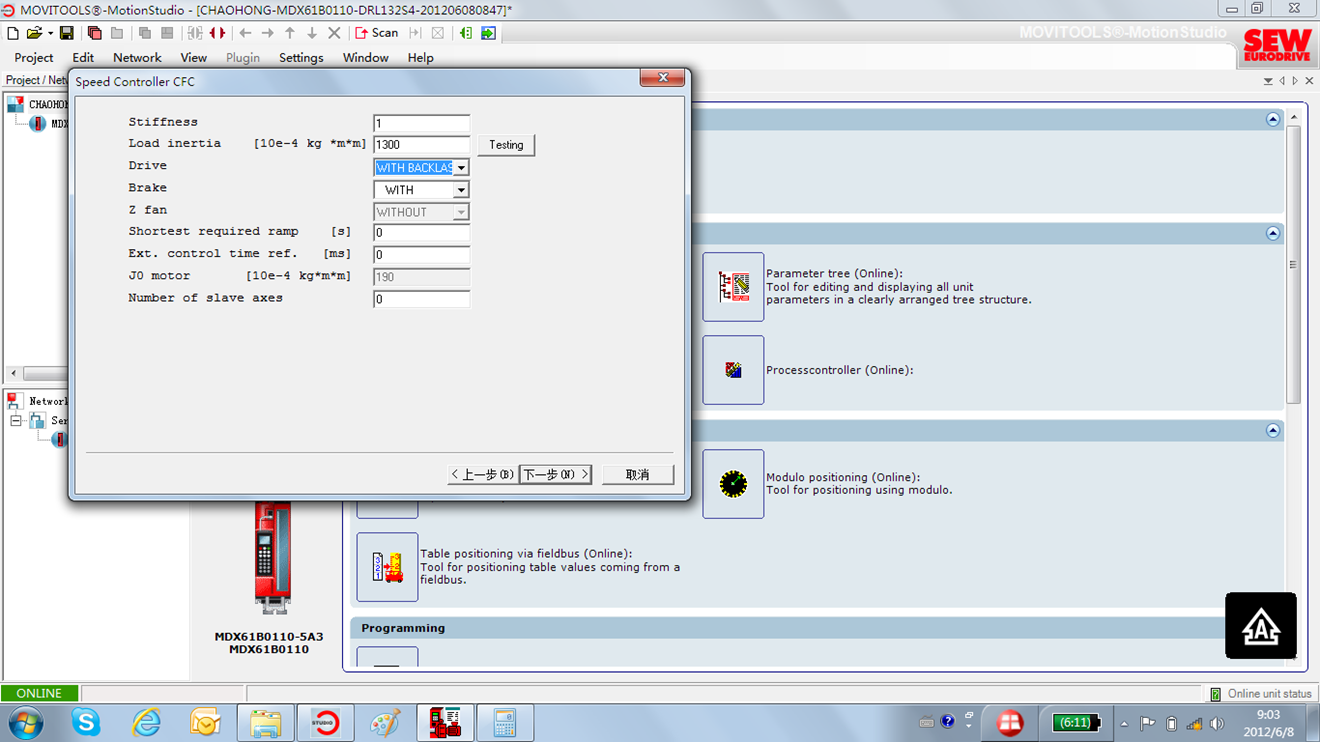
17、准确填写WEISS计算的load inertia(负载转动惯量),drive选择“With Backlash”;
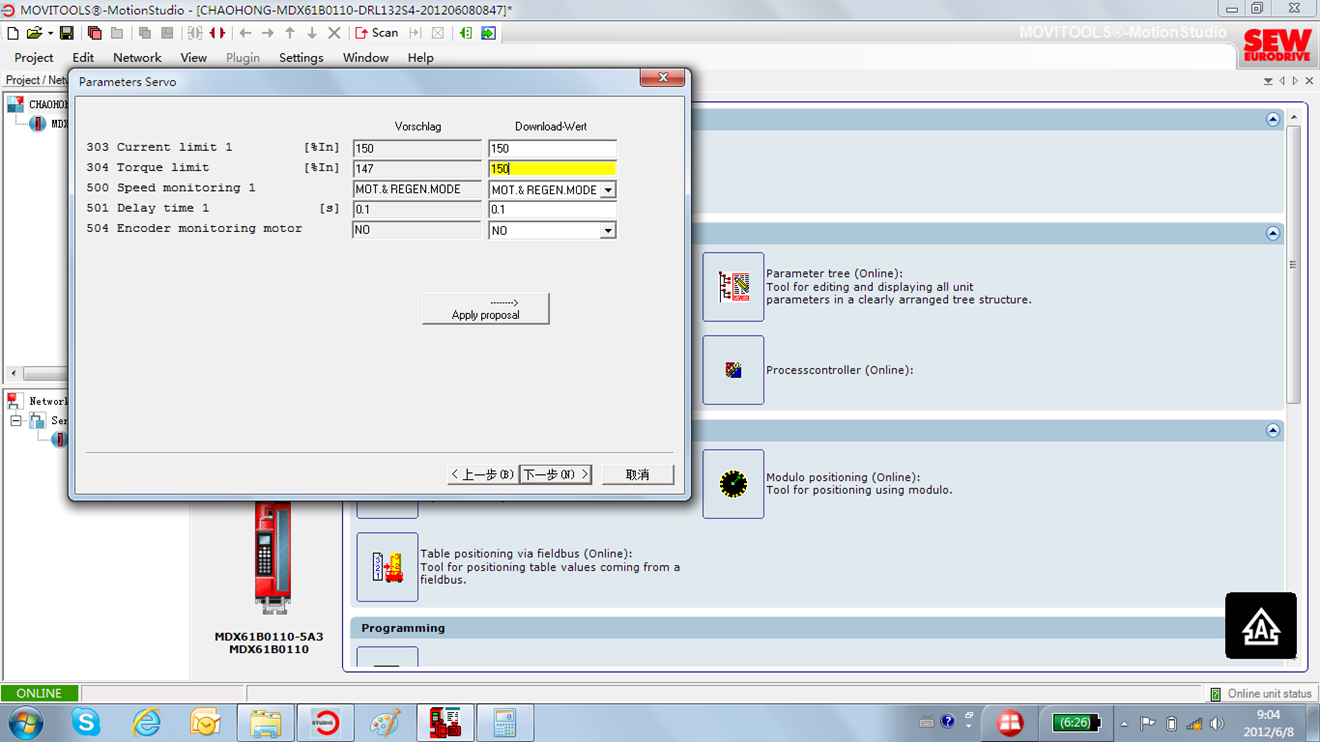
18、相关参数使用WEISS所提供参数表中的推荐参数(另P501=0.2),其它参数选择“Apply Proposal(使用推荐值)”;
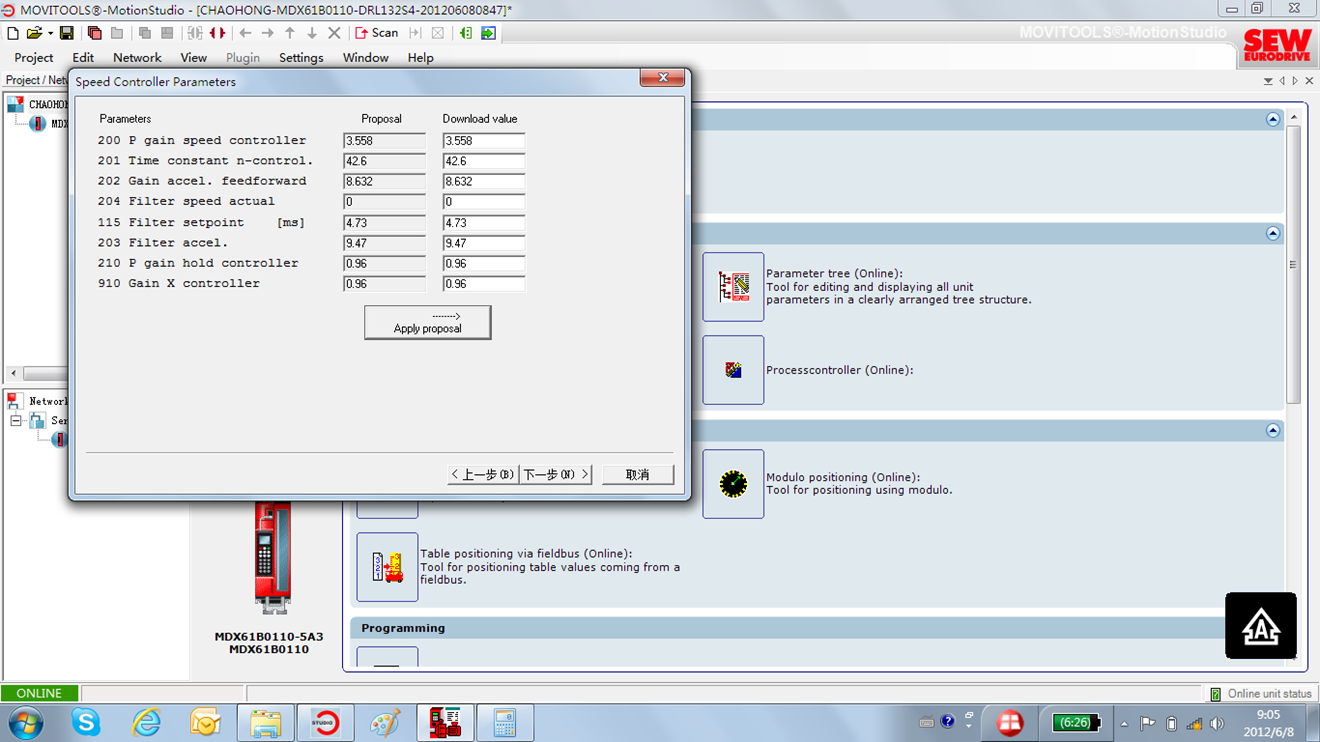
19、转速控制器参数选择“Apply Proposal(使用推荐值)”;
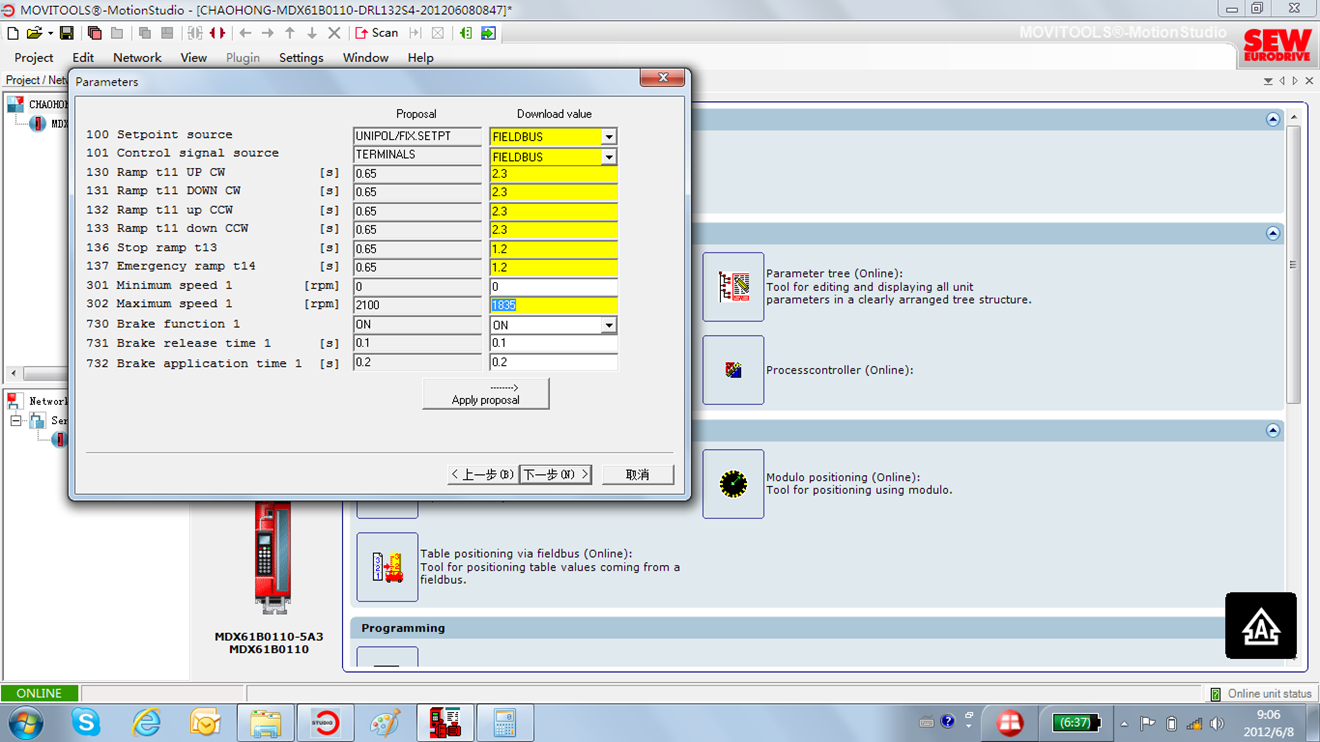
20、 P100“设定值源”和P101“控制信号源”选择“FIELDBUS”,其它相关参数使用WEISS所提供参数表中的建议参数,剩余参数选择“Apply Proposal(使用推荐值)”;
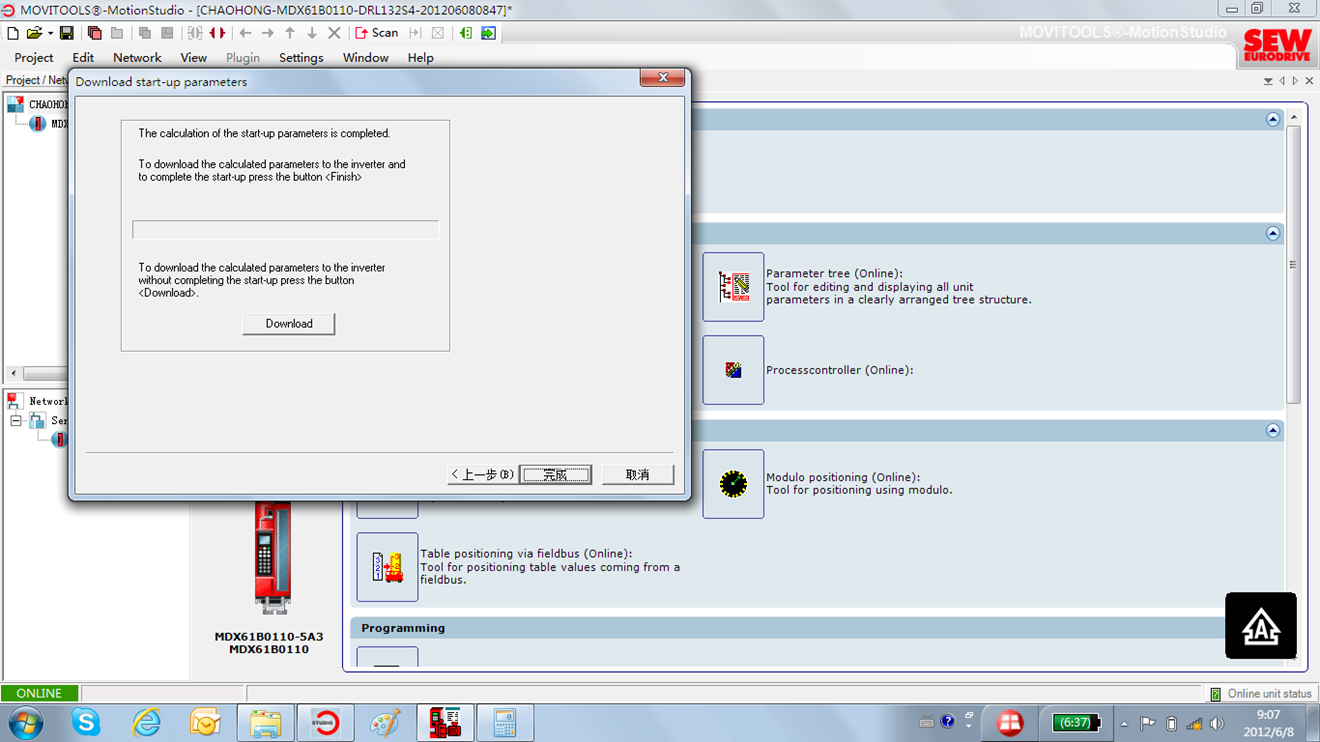
21、点击“完成”,将初始化信息下载至控制器。如需配置parameter set-2,点击“download”,再进行参数包2的配置;
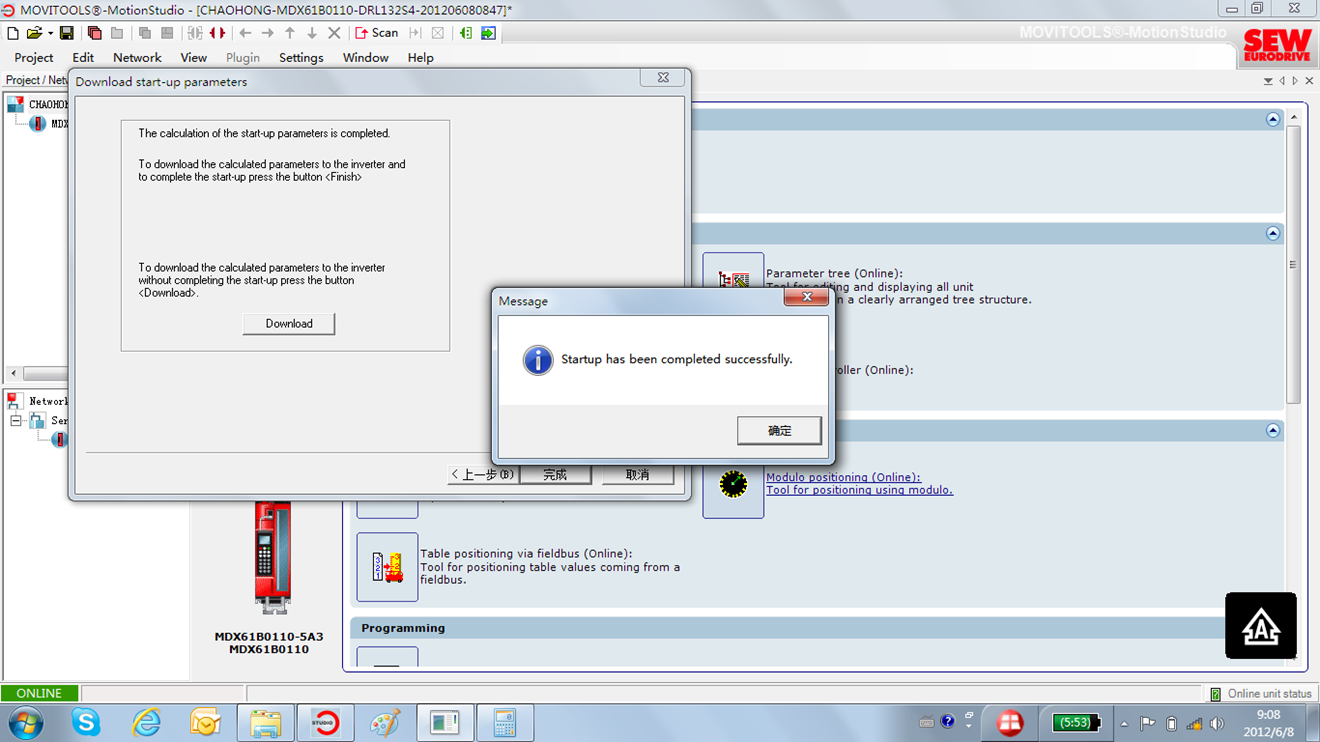
22、初始化完全完成后,会跳出提示框,点击“确定”;
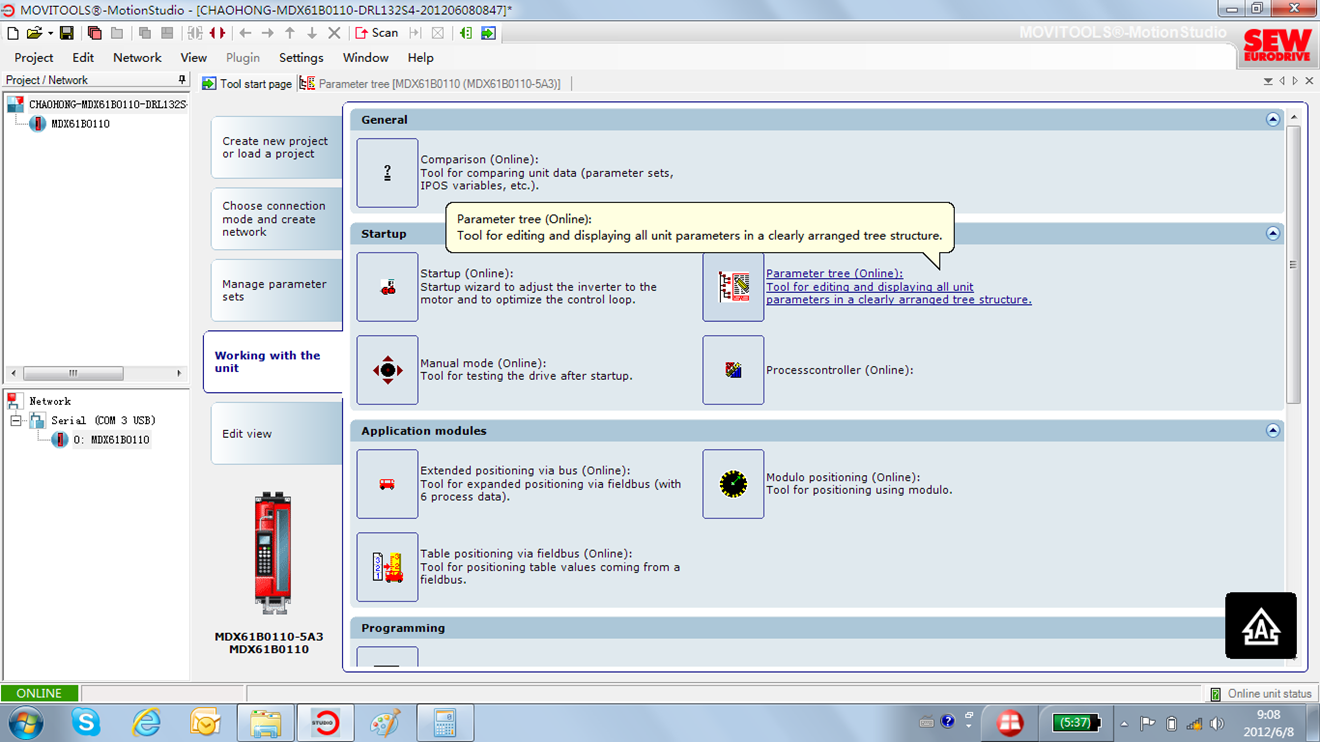
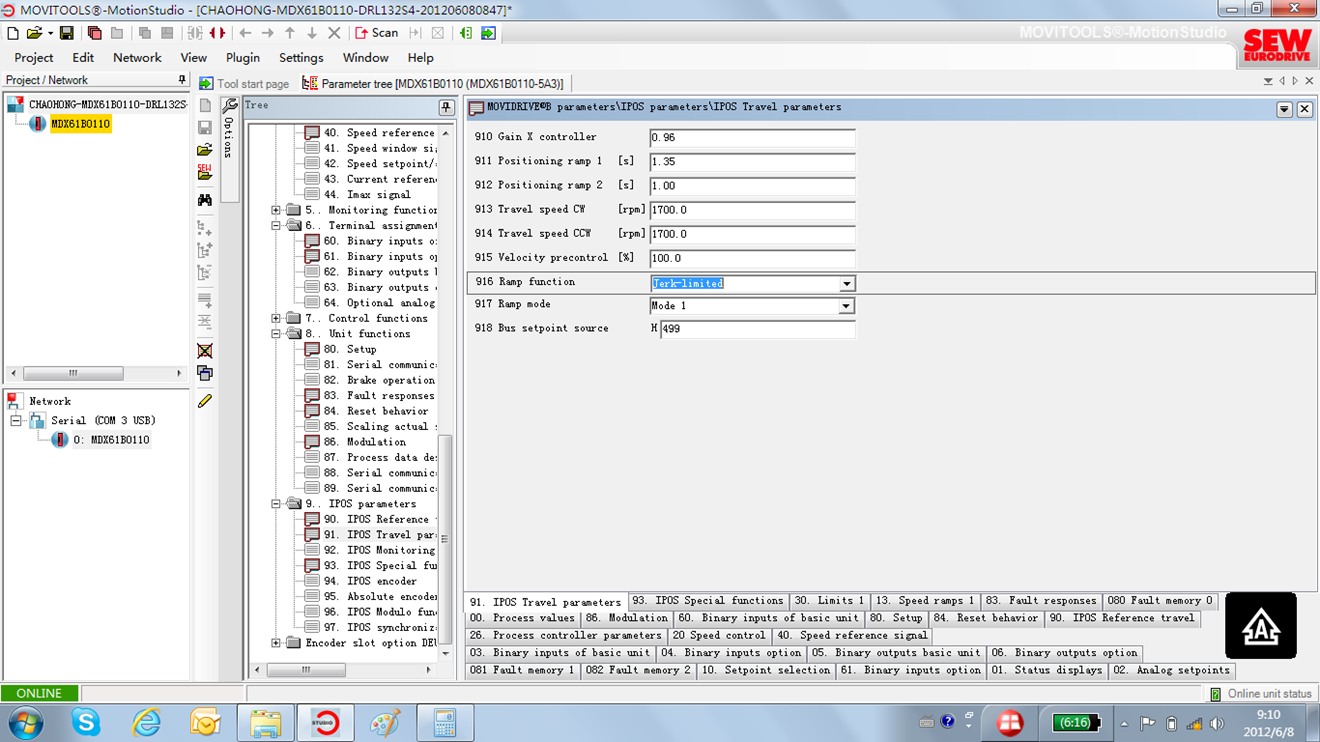
23、点击“parameter tree”,进行WEISS所提供参数表中其它相关参数的设置;
24、例如,P911定位斜坡1,P913/P914运转转速CW/CCW,P916斜坡形式需设为“Jerk-Limited”;
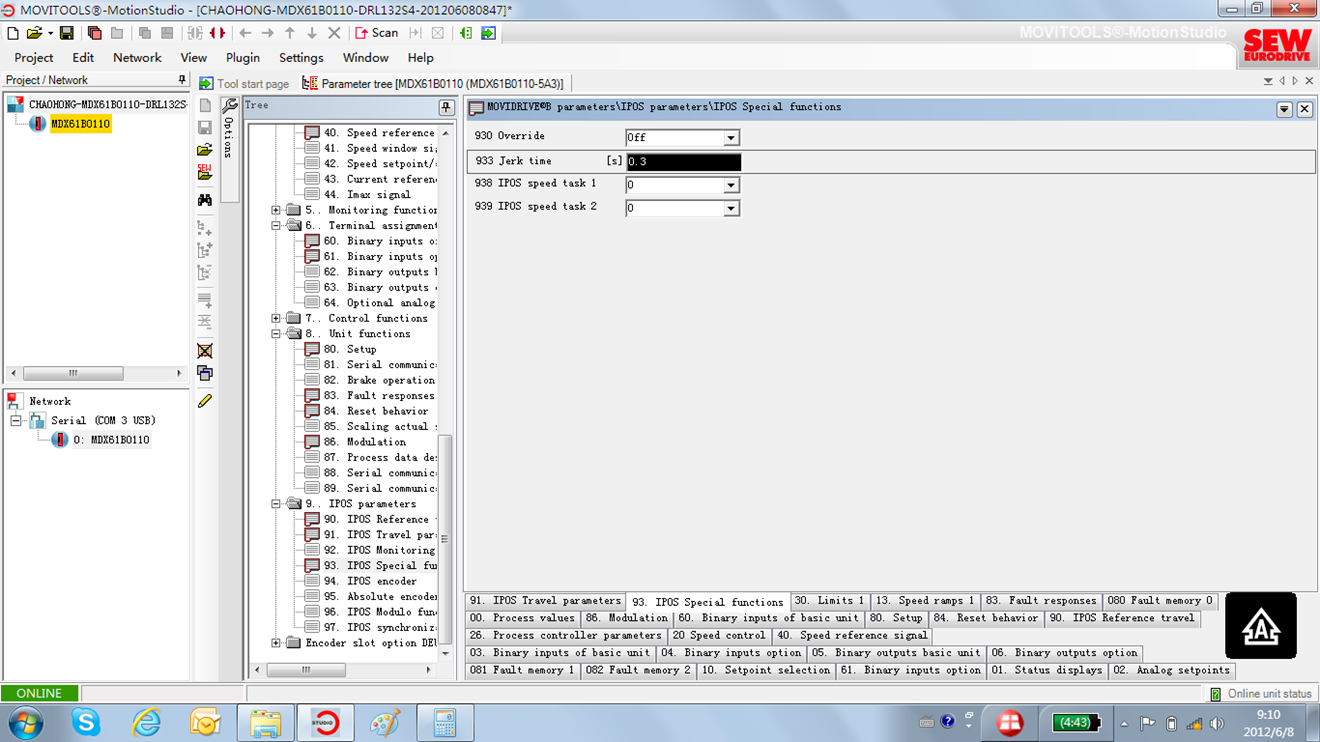
25、例如,P933突变时间0.3;
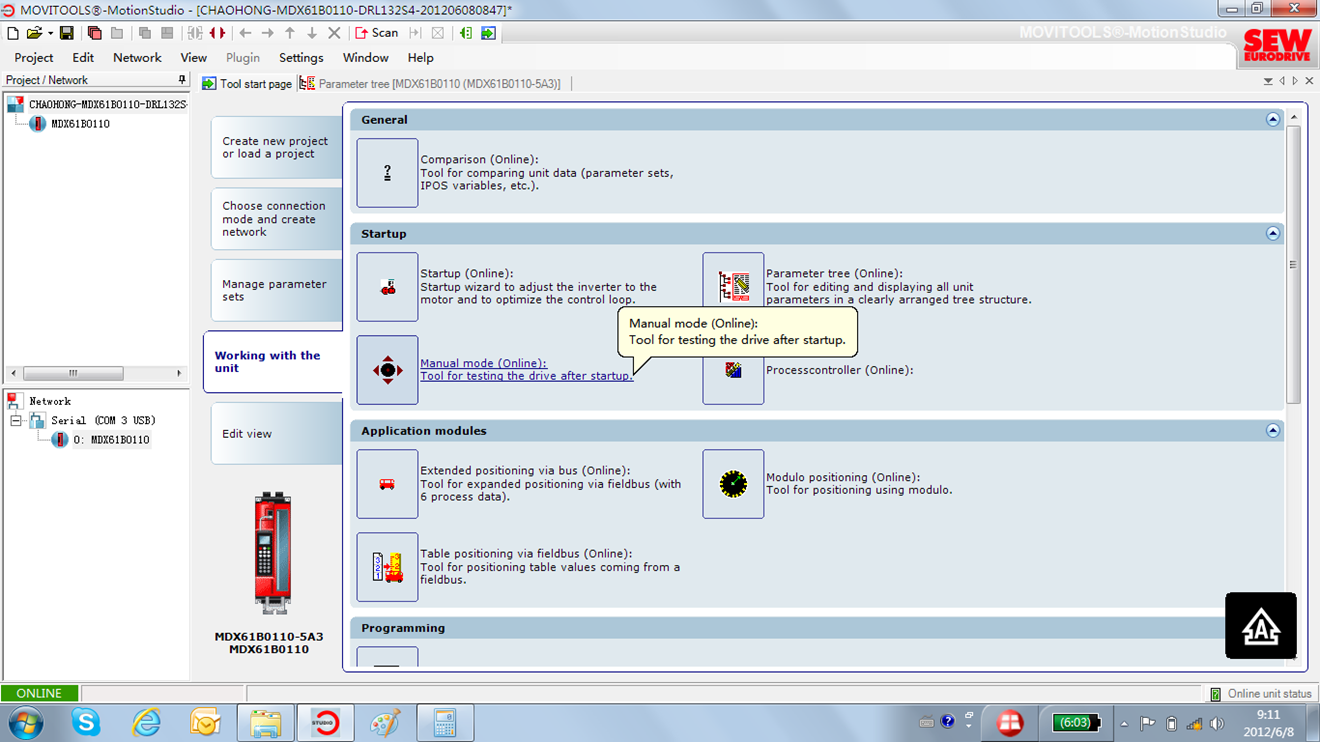
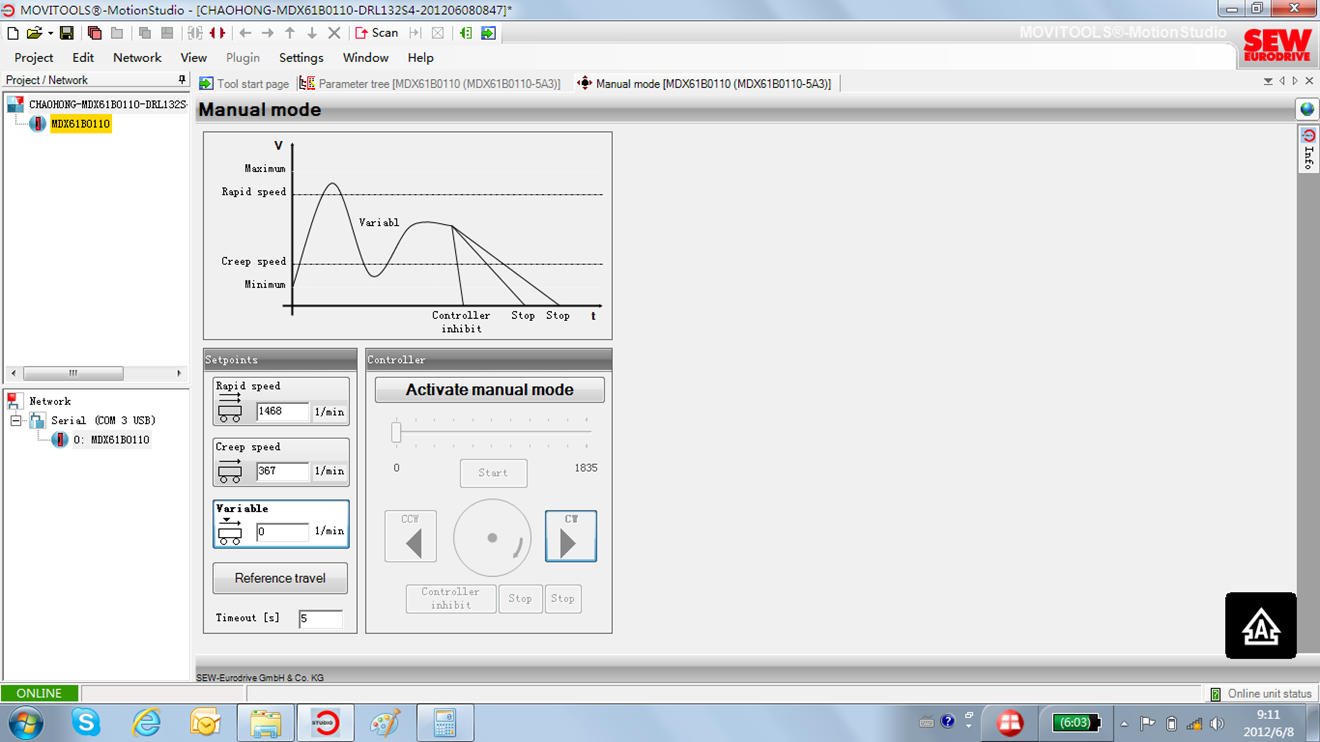
26、参数配置为在线实时进行,完成后,点击“manual mode”手动模式;
27、点击“Activate manual mode”,激活手动模式;
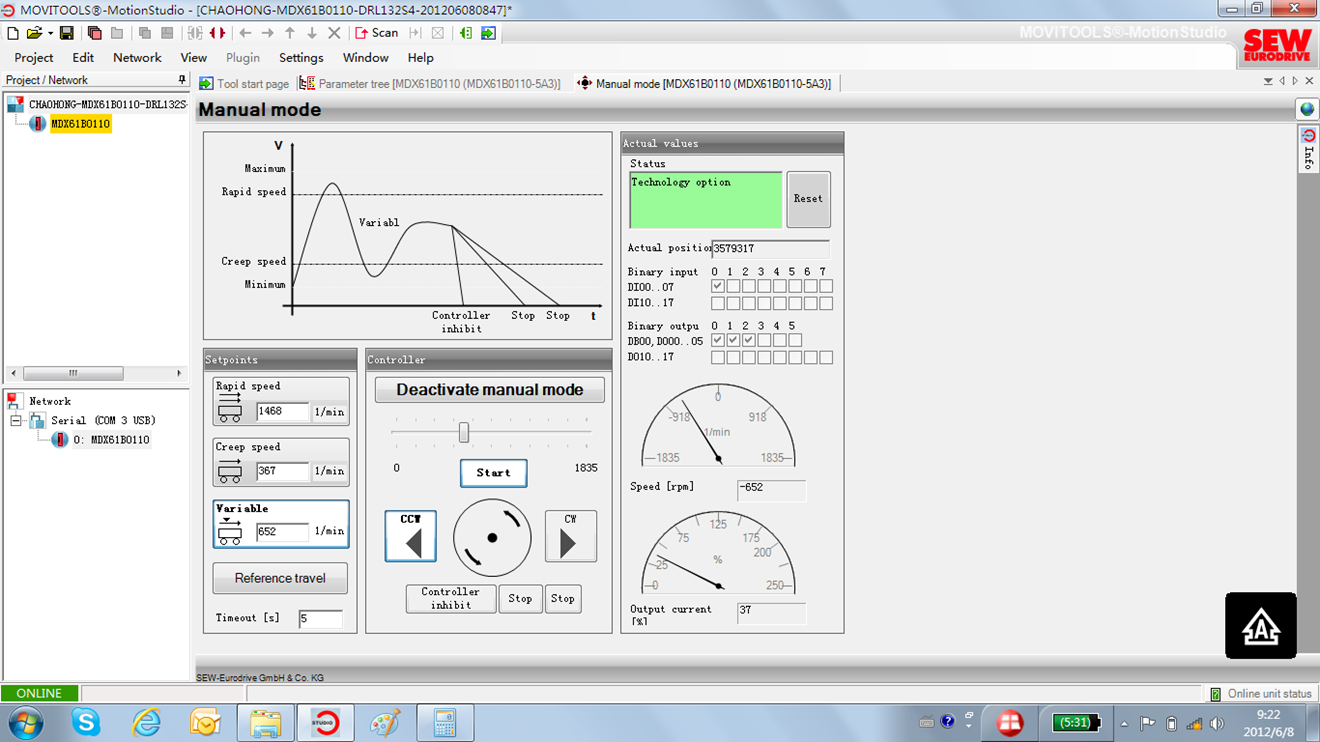
28、连接控制器X13/DIΦΦ“控制器禁止”端子的二进制输入;
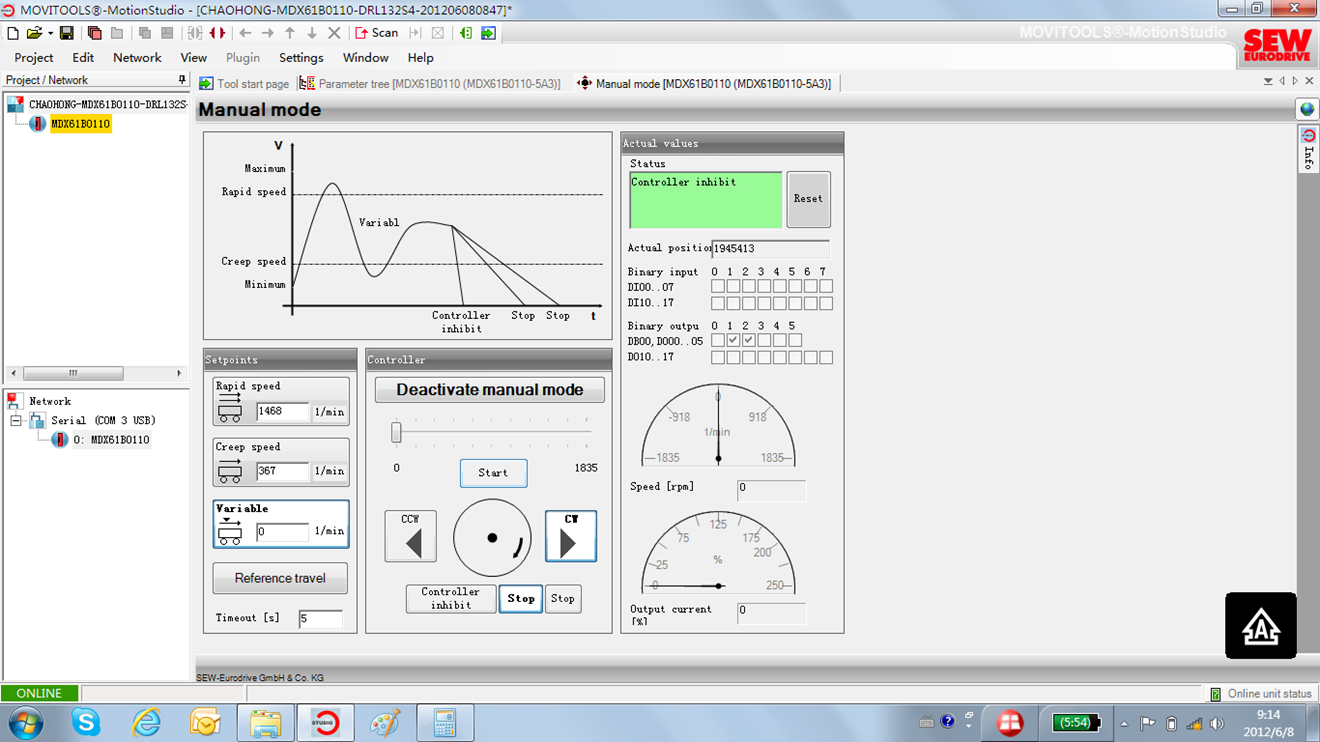
29、选择控制速度,旋转方向,点击“start”或“stop”进行启停控制;
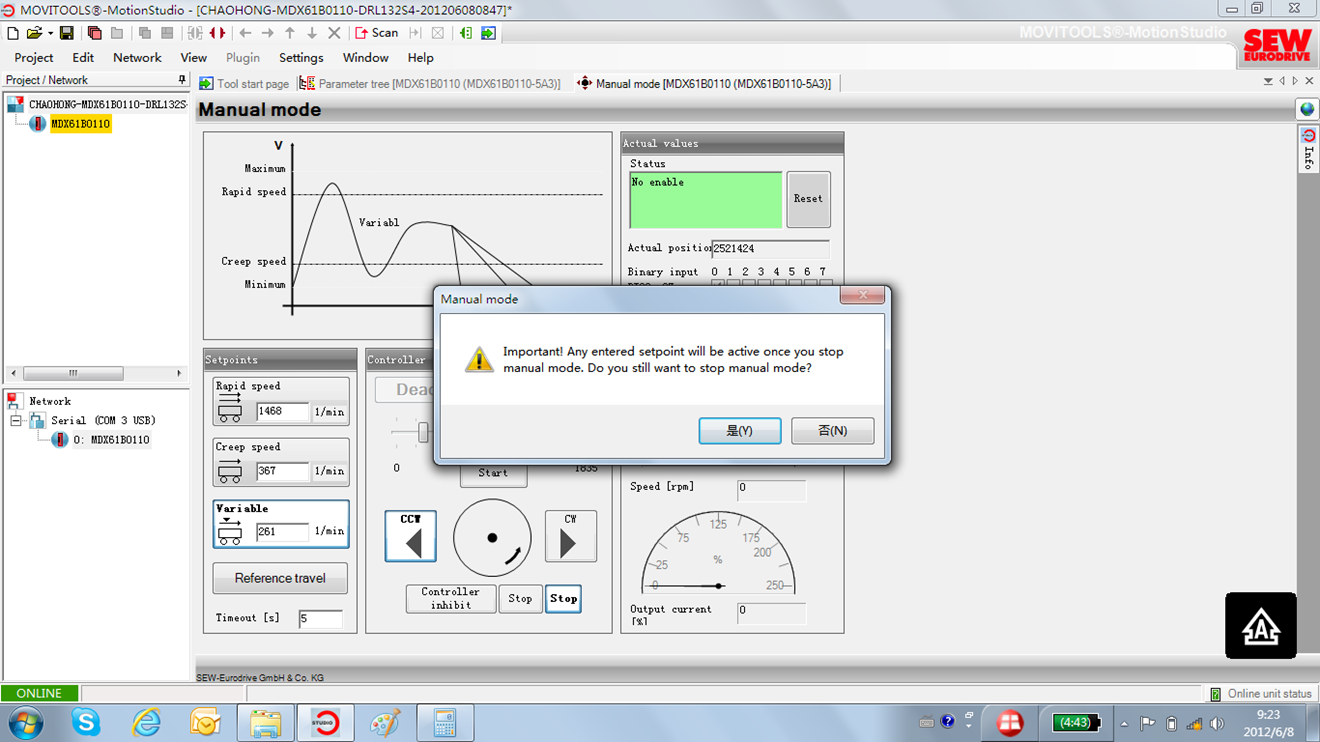
30、手动模式下,转台运行正常后,点击“Deactivate manual mode”;
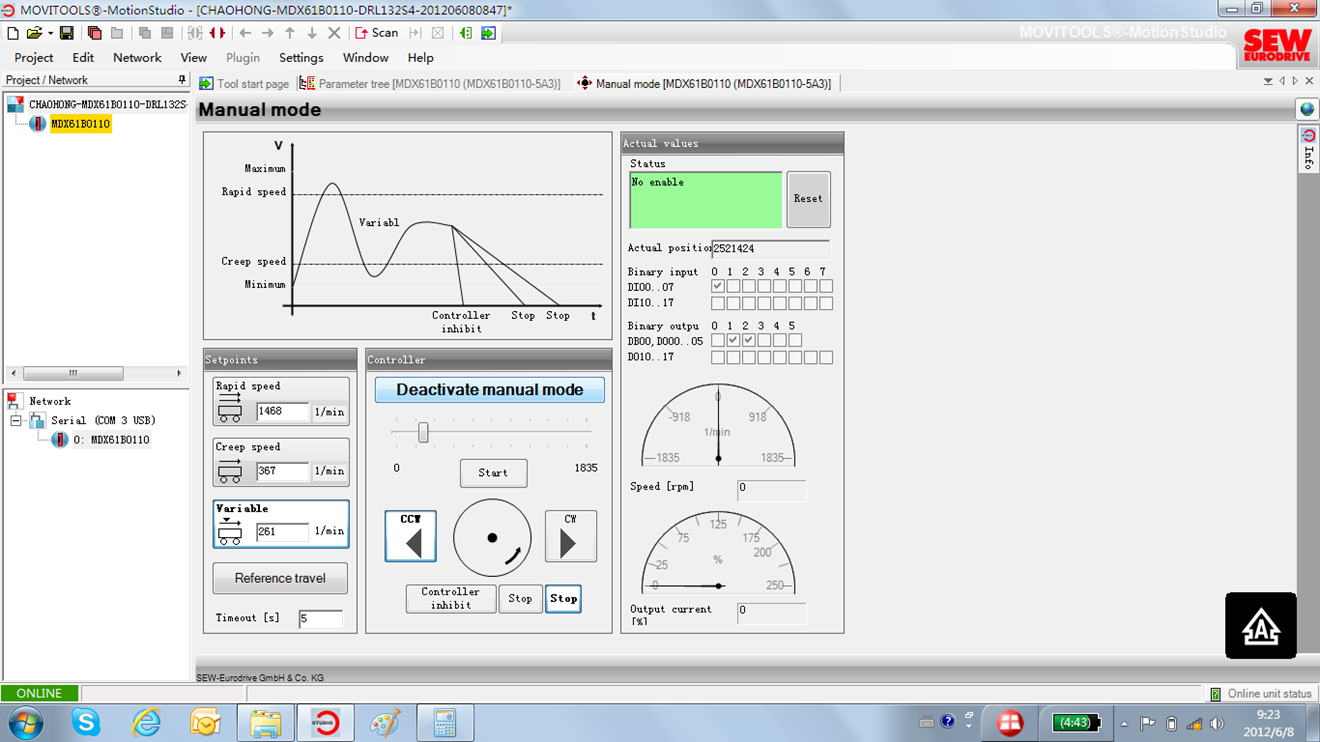
31、选择“是”,退出手动模式;
variable setpoint-0801
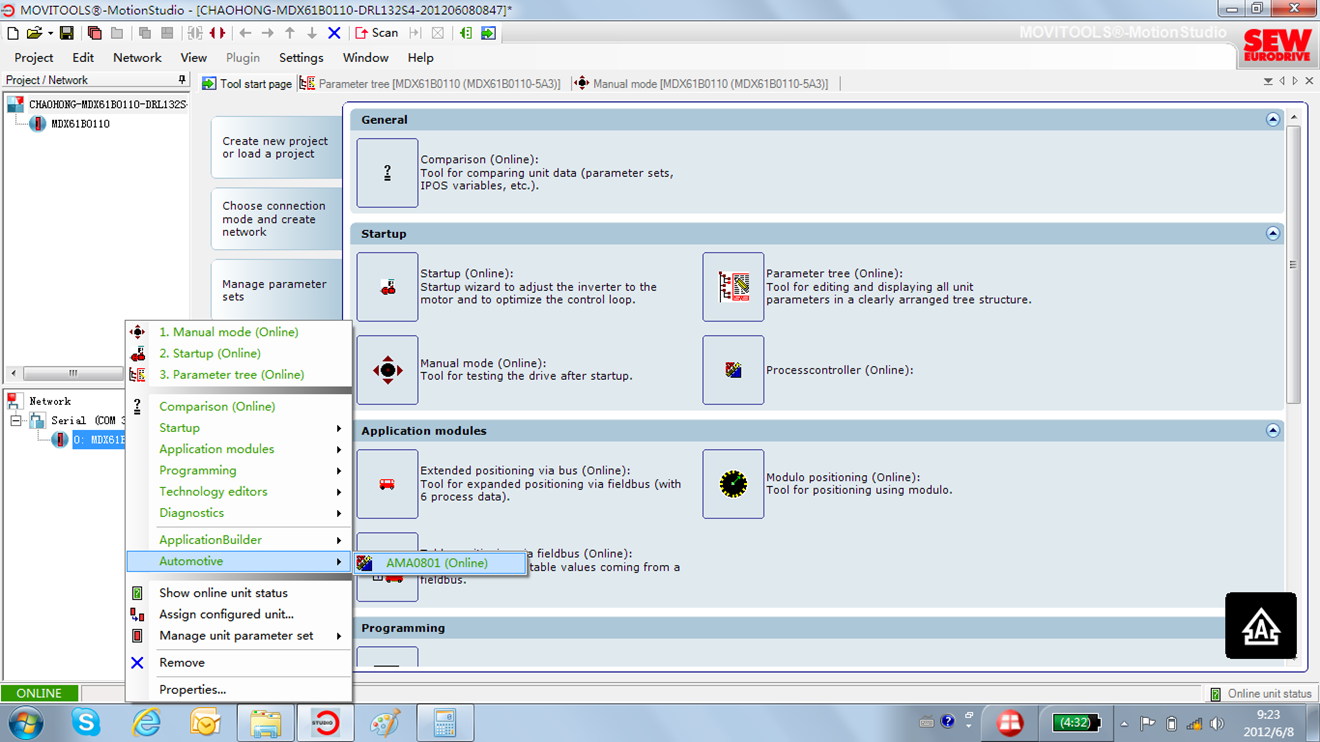
32、创建AMA0801模块;
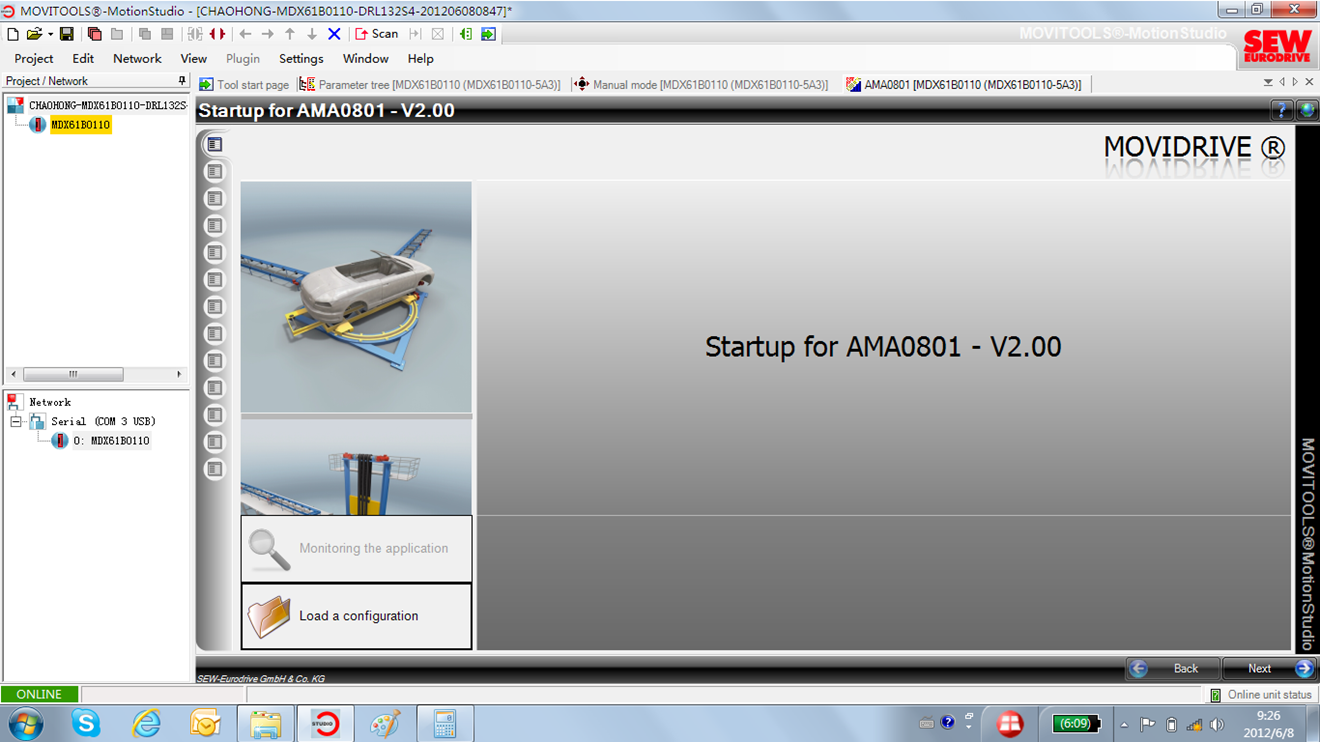
33、去除控制器X13/DIΦΦ“控制器禁止”端子的二进制输入,点击“next”,开始初始化AMA0801模块;
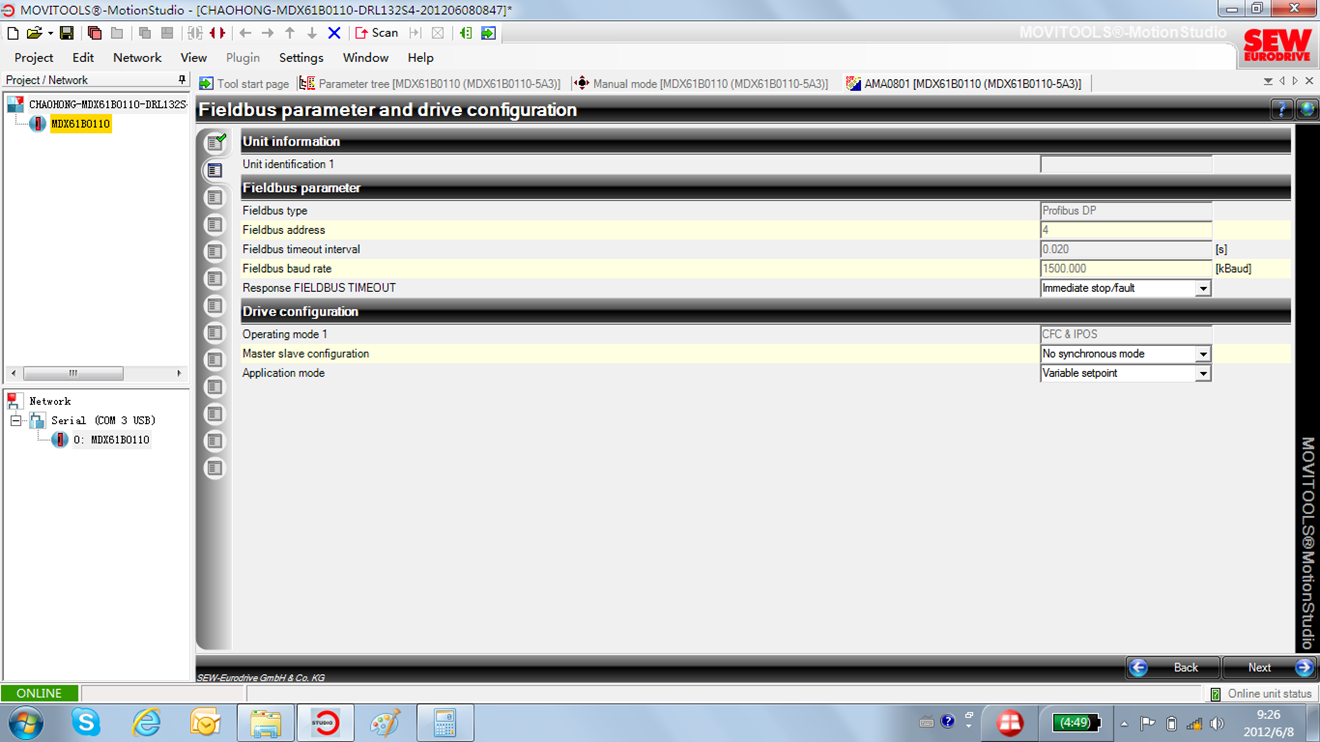
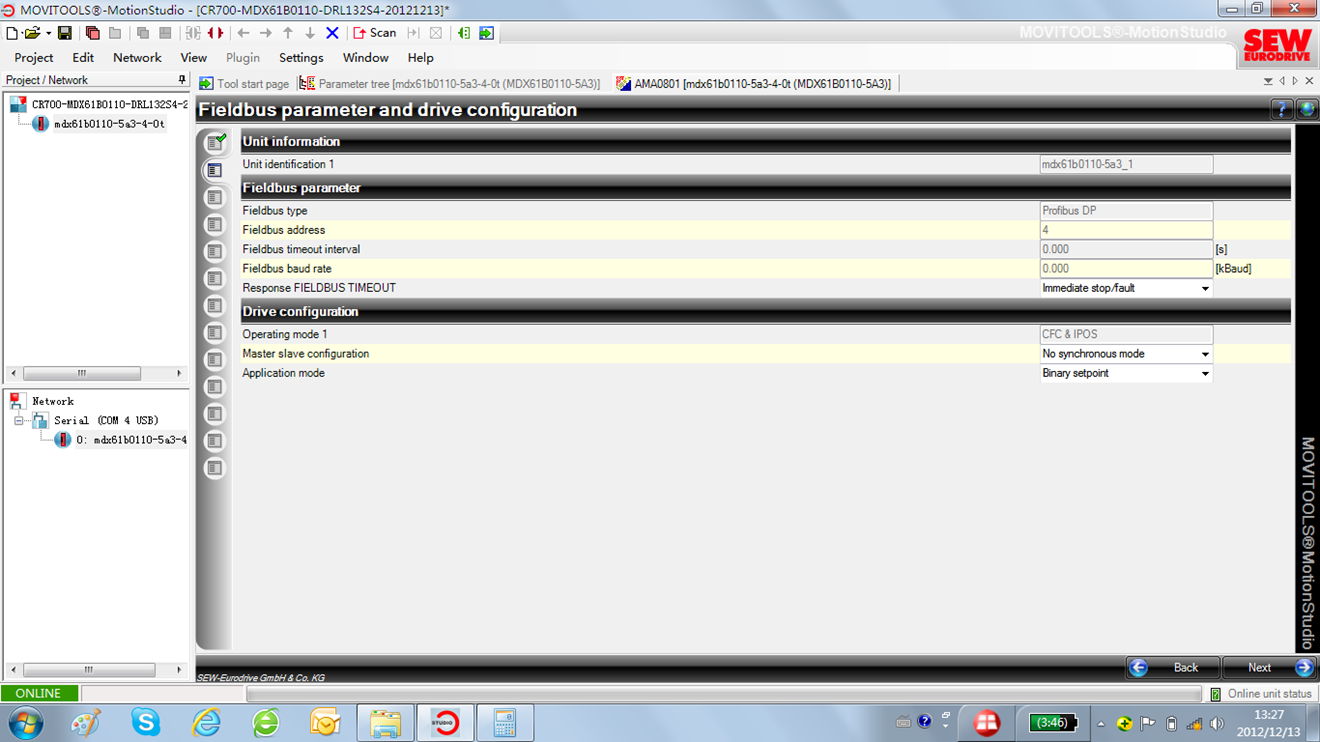
34、总线参数和控制器配置页面,建议使用其默认参数;
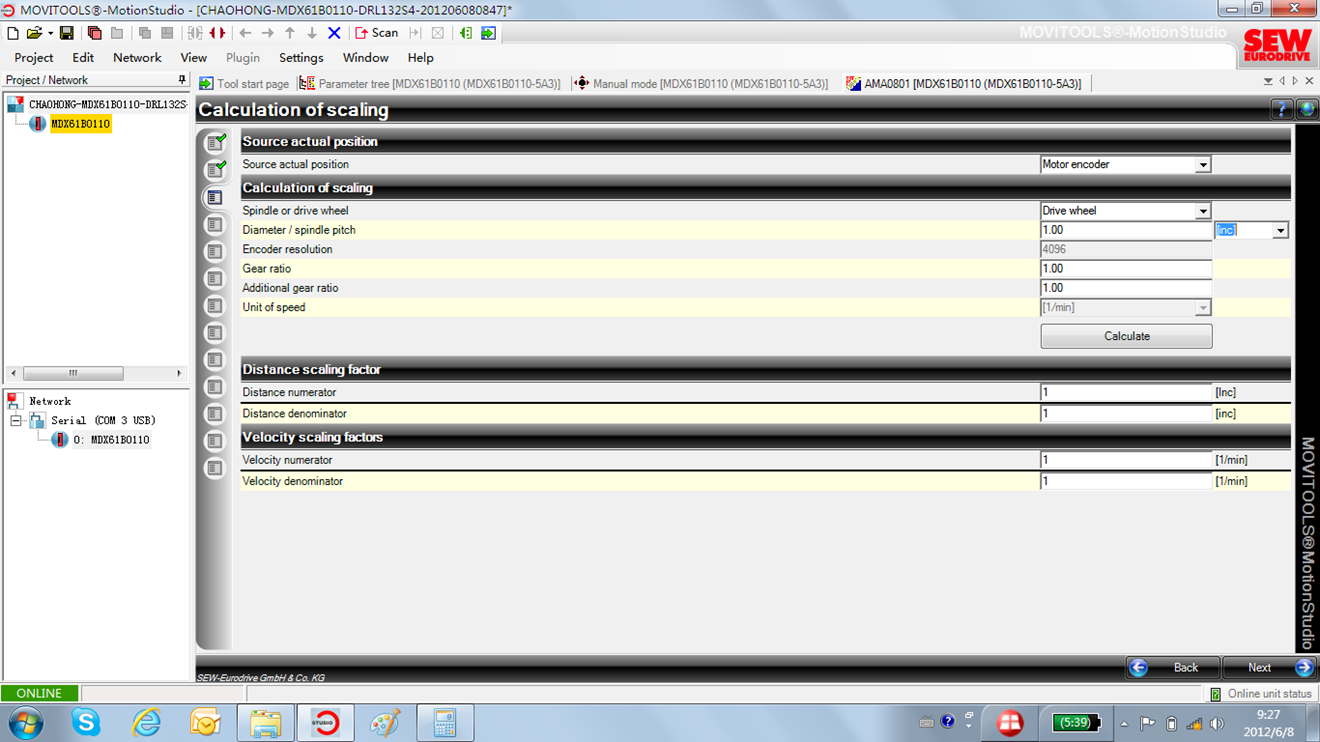
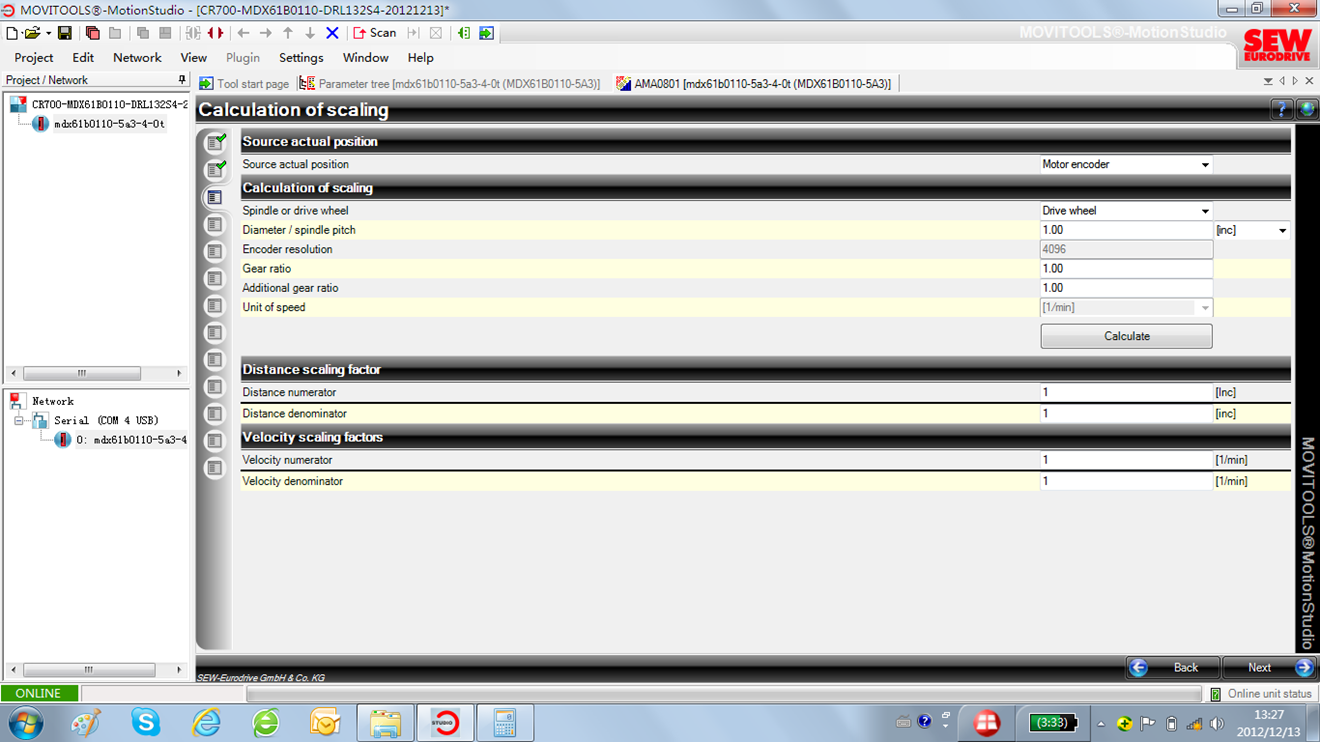
35、刻度计算页面,“Diameter/spindle pitch”的单位选择“inc”;
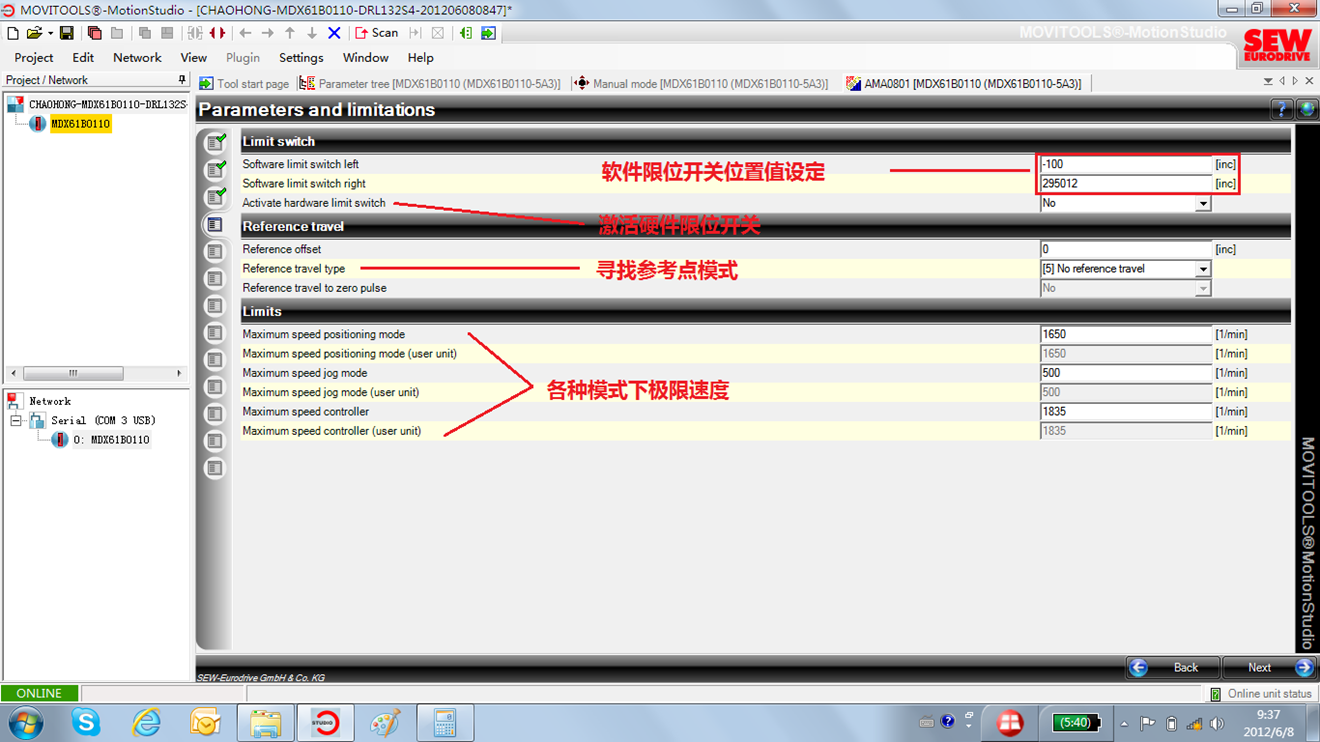
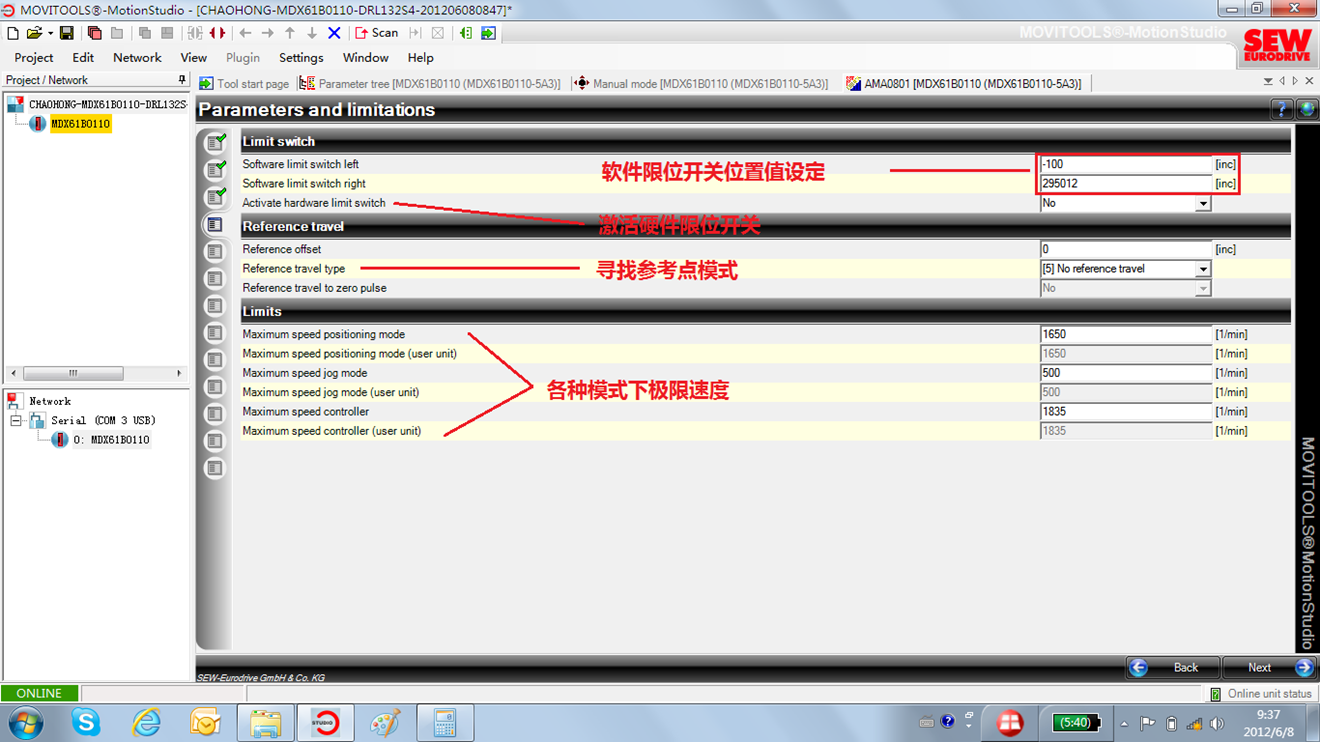
36、参数和极限页面,若使用硬件限位开关,需将CW和CCW限位开关分别接到控制器X13/DI Φ 4和X13/DI Φ 5端子,同时在软件上选择“YES”,“parameter tree”中将P603和P604端子功能设置为相应的限位功能;如果没有原点传感器,寻找参考点模式选择5,即将当前点作为原点;
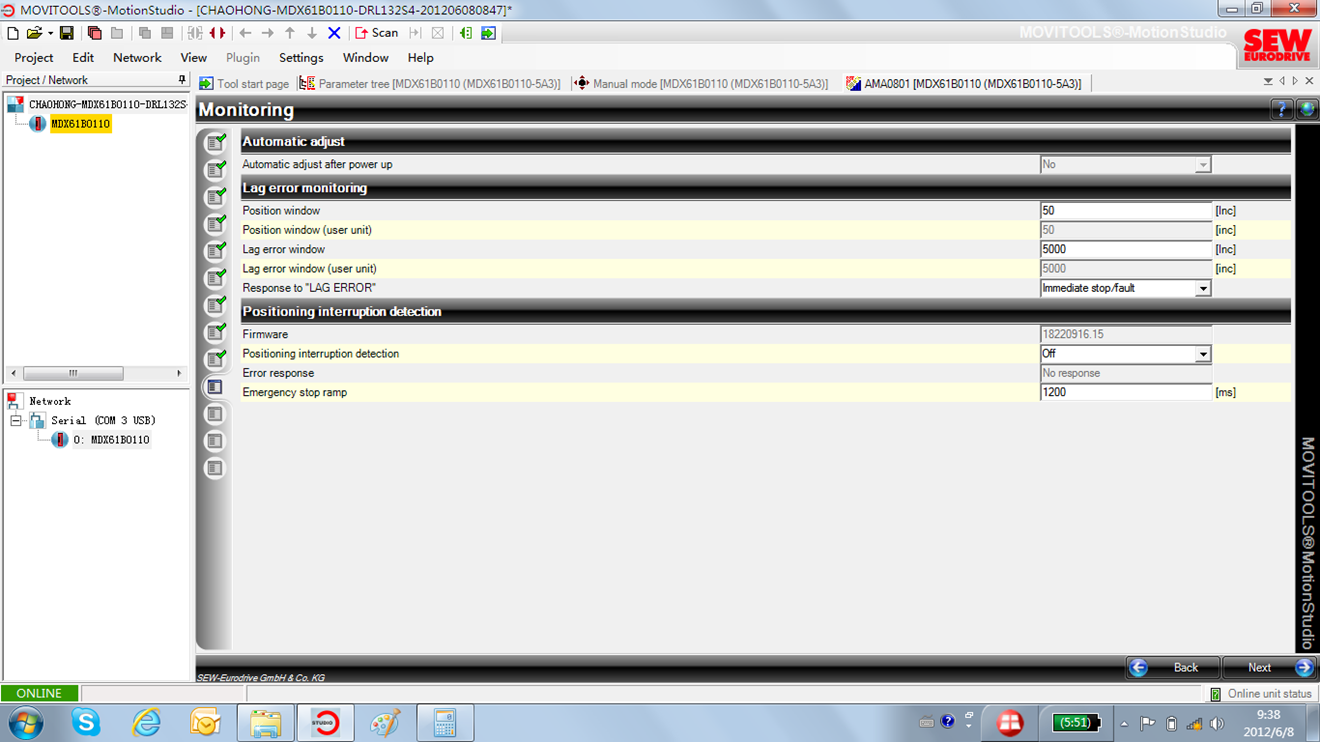
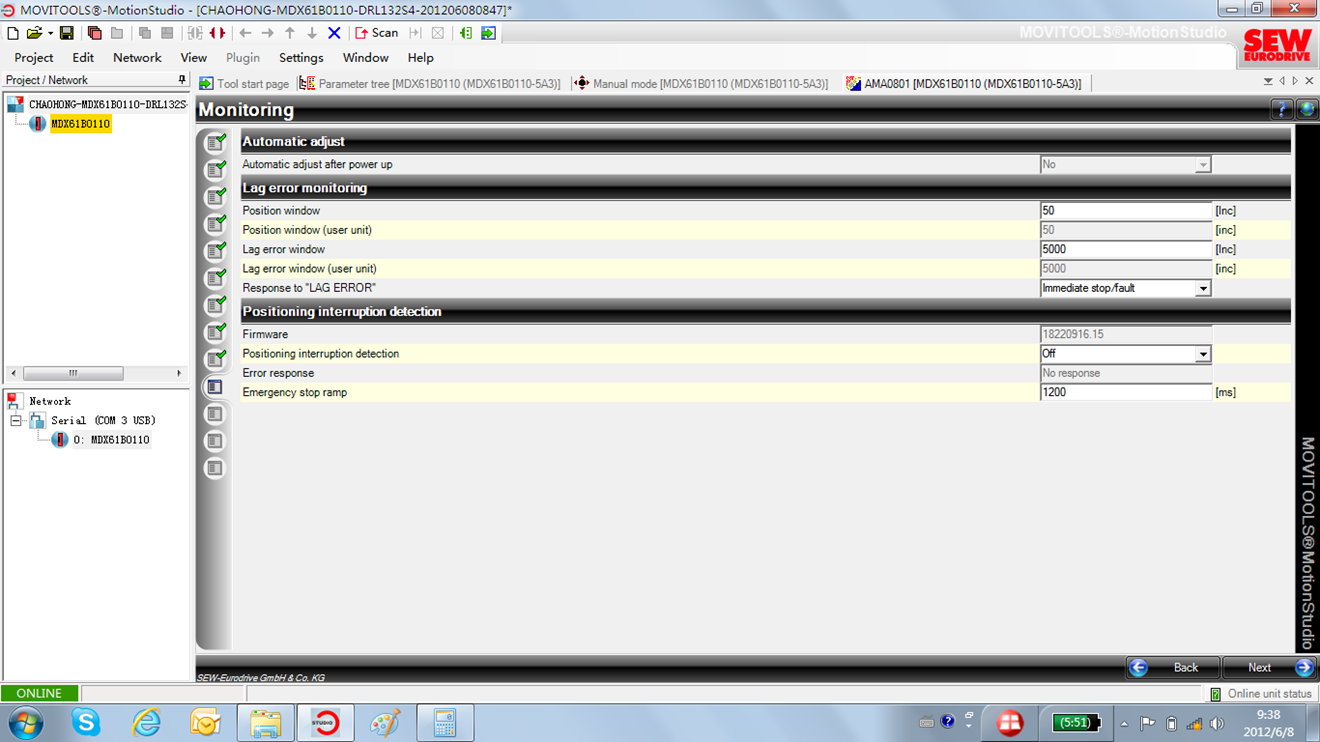
37、监控设置页面,建议使用其默认参数;
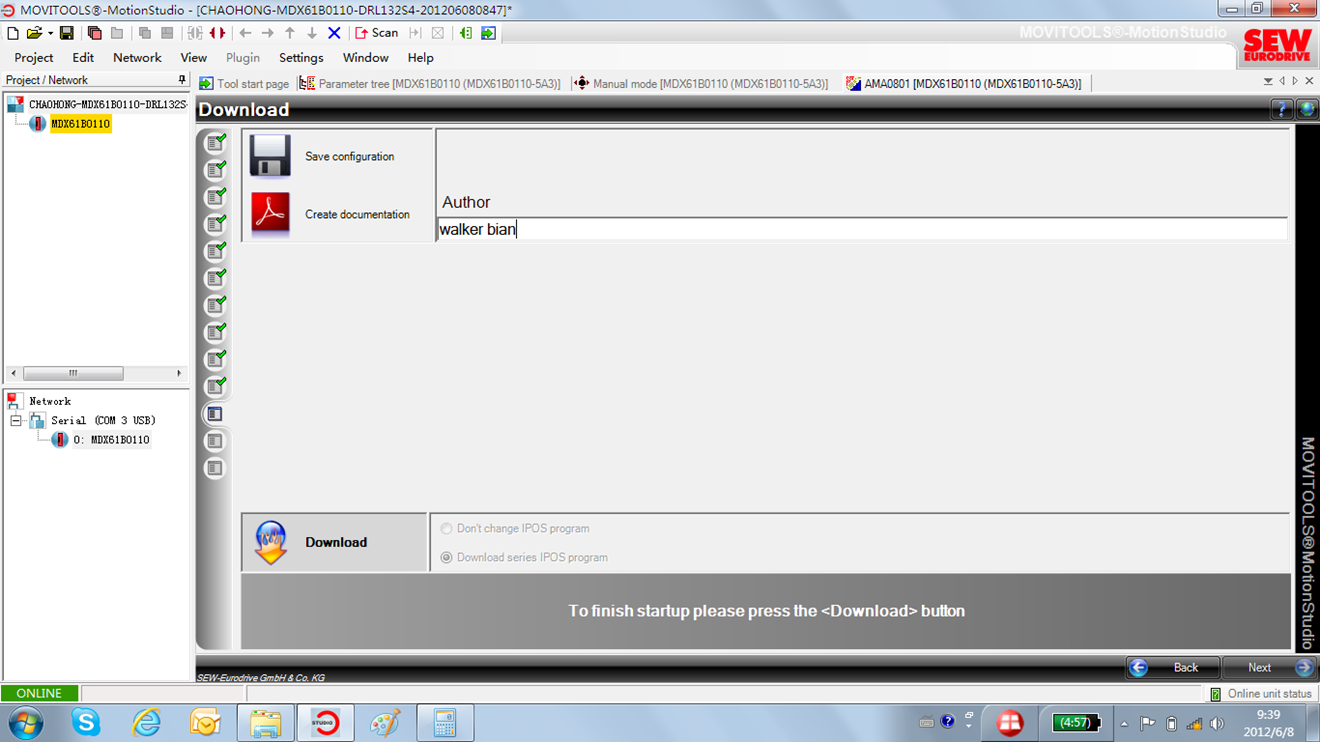
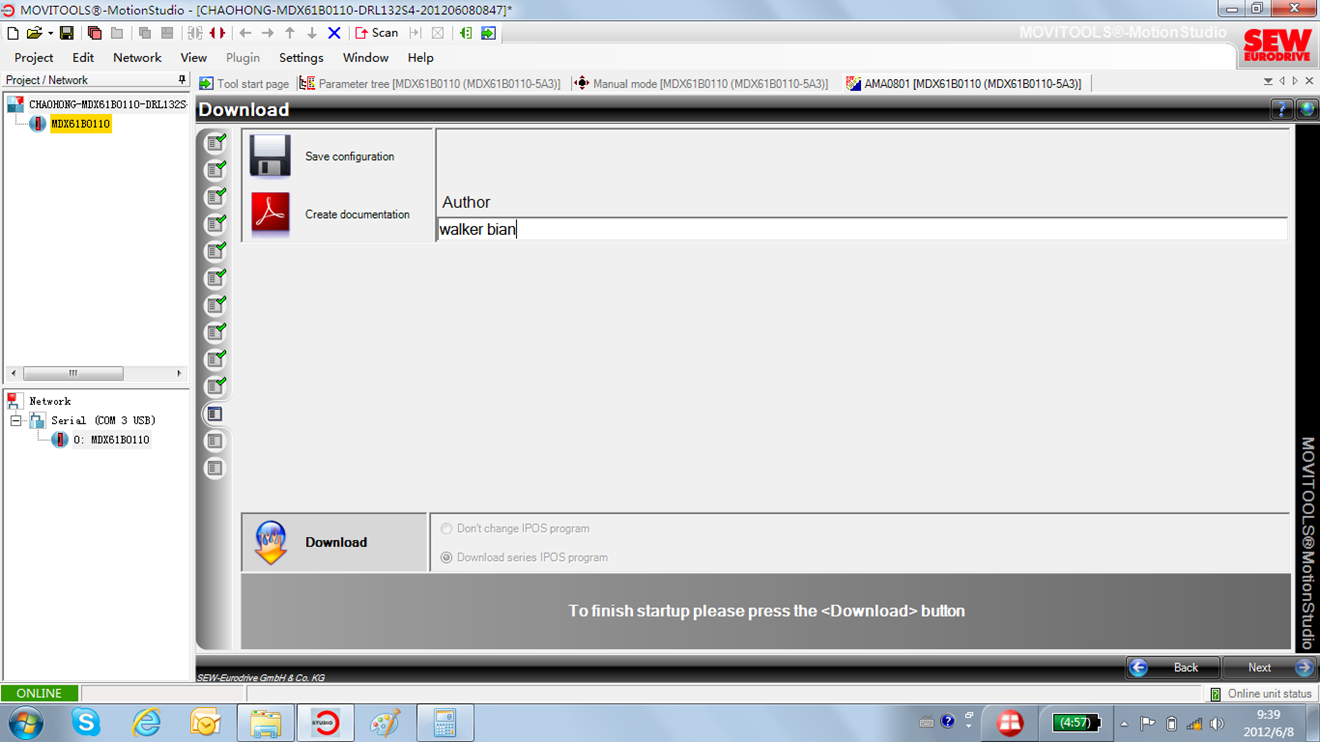
38、点击“download”,将AMA模块设置下载到控制器;
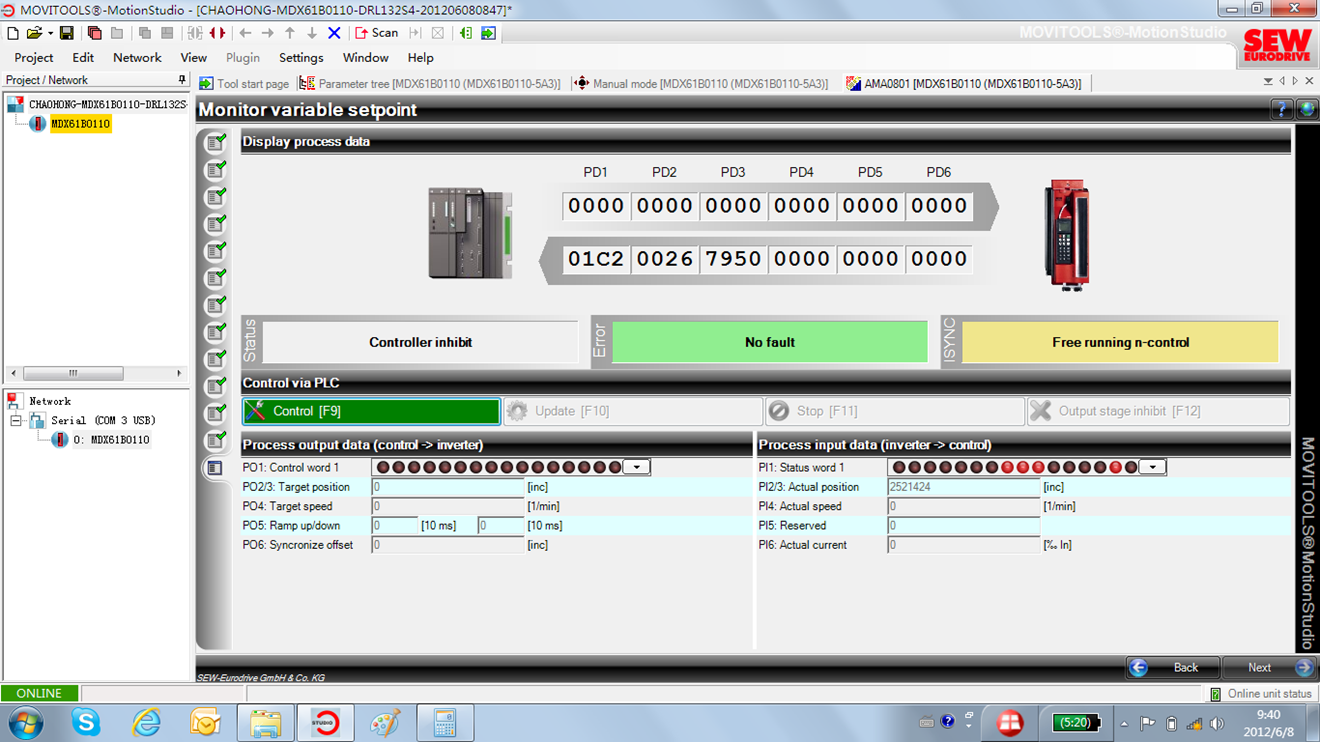
39、下载完成后,软件自动跳至总线控制监视器;
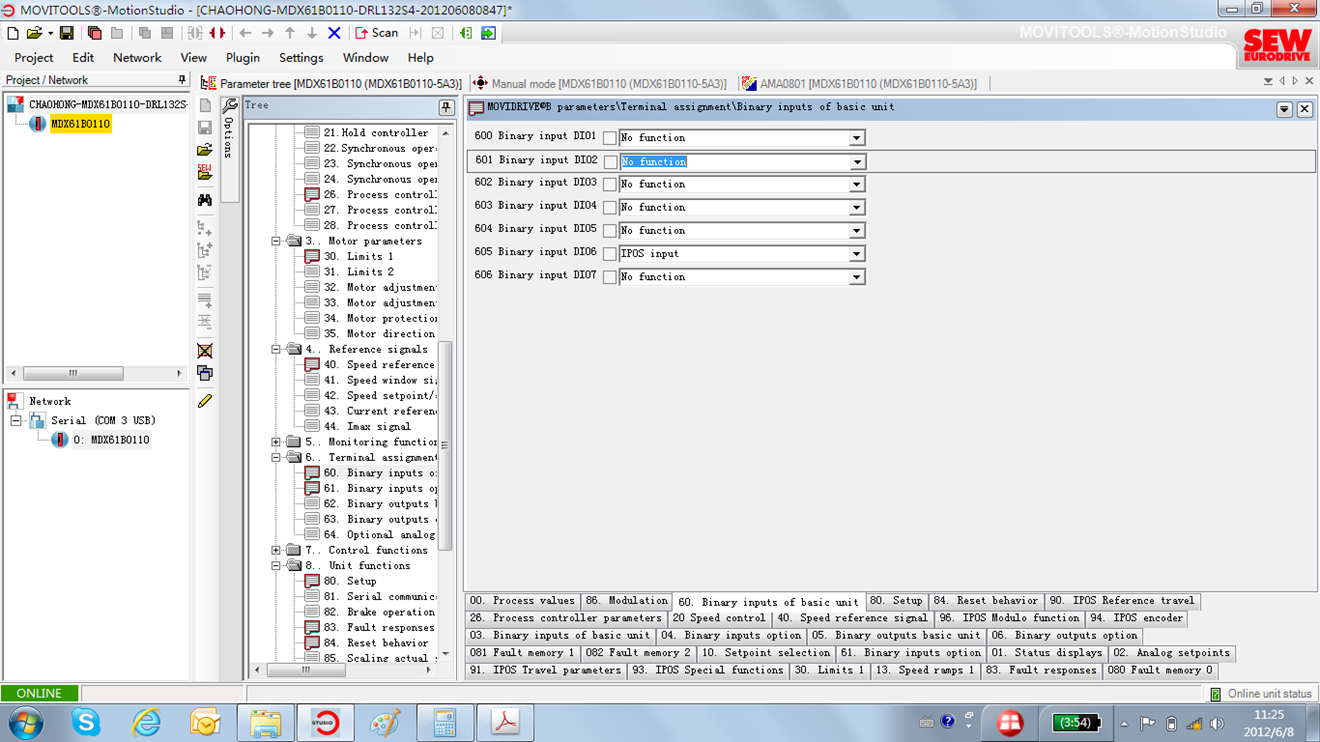
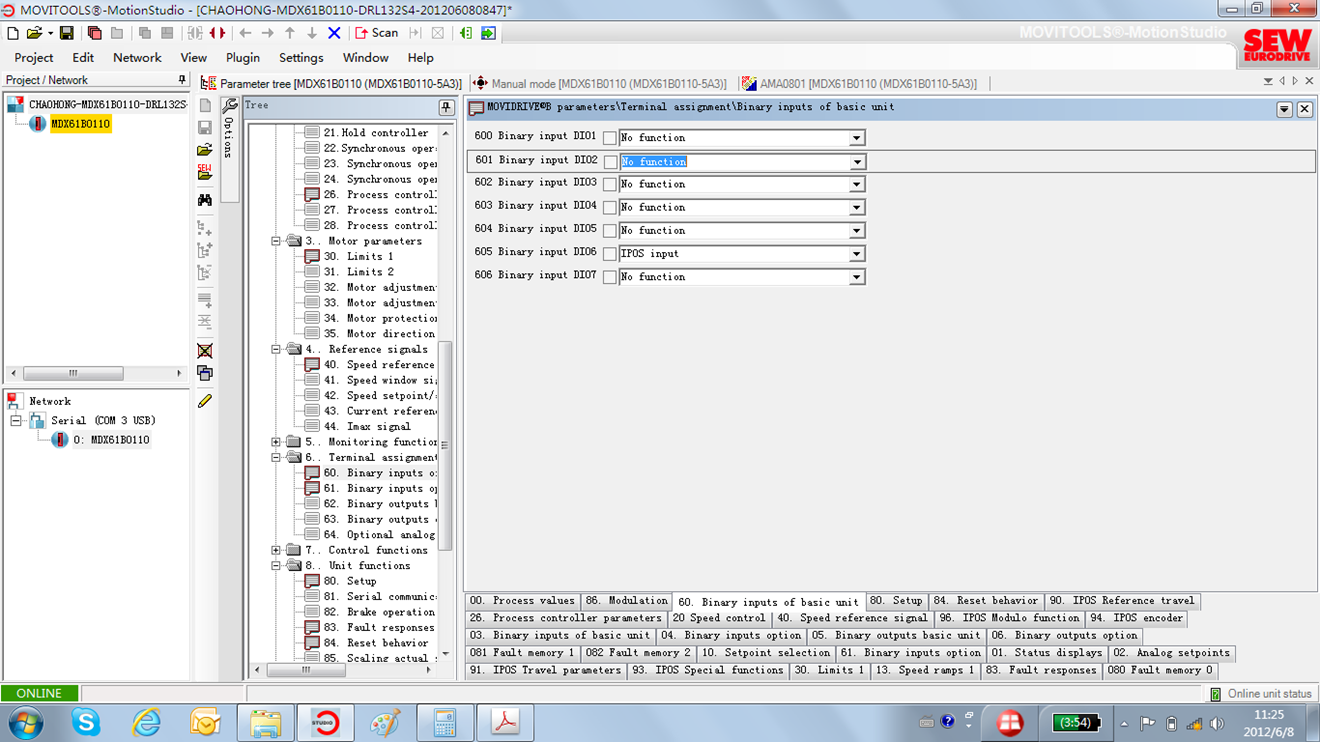
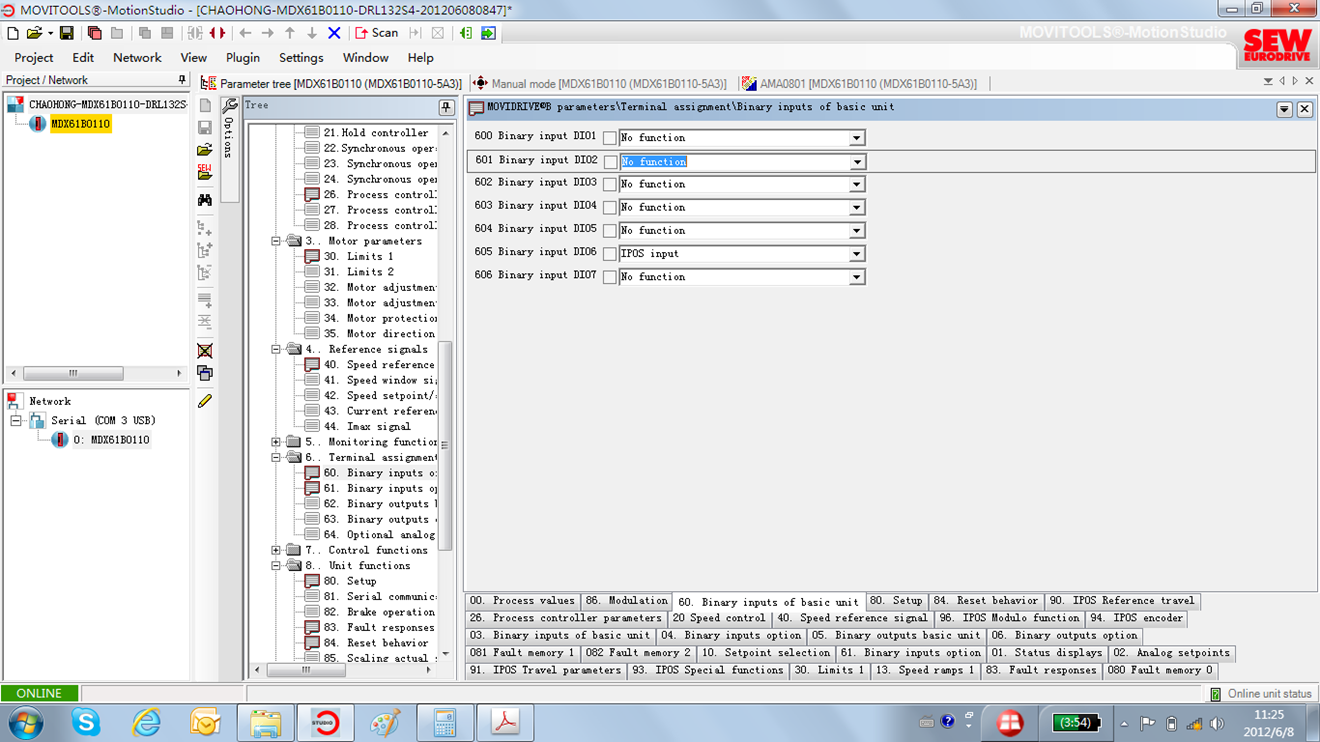
40、更改二进制输入设置,若不使用二进制输入控制X13/DI Φ 1“ENABLE/STOP”,必须将“parameter tree”中P600设为“NO FUNCTION”,若不使用原点传感器,将P602“Reference Cam”设为“NO FUNCTION”,若不使用硬件限位开关,将P603和P604设为“NO FUNCTION”;
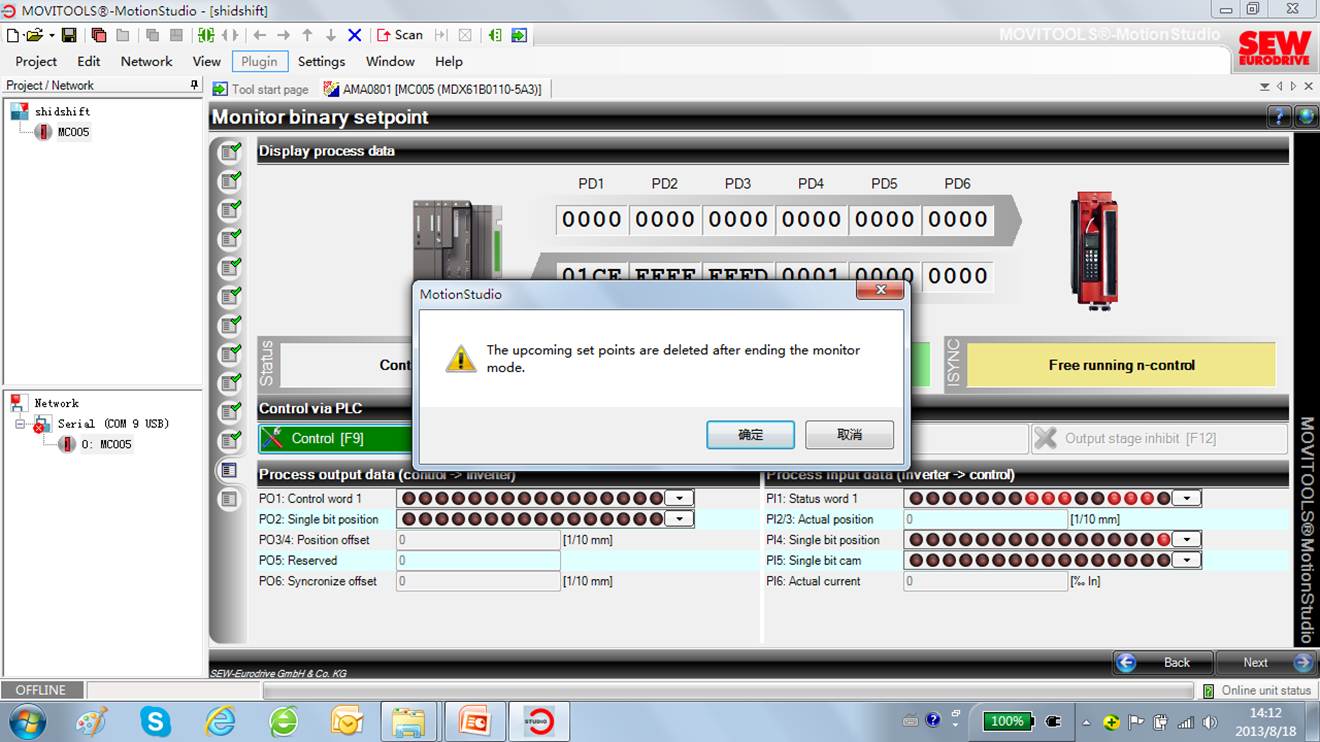
41、点击“control”,确定弹出对话框;
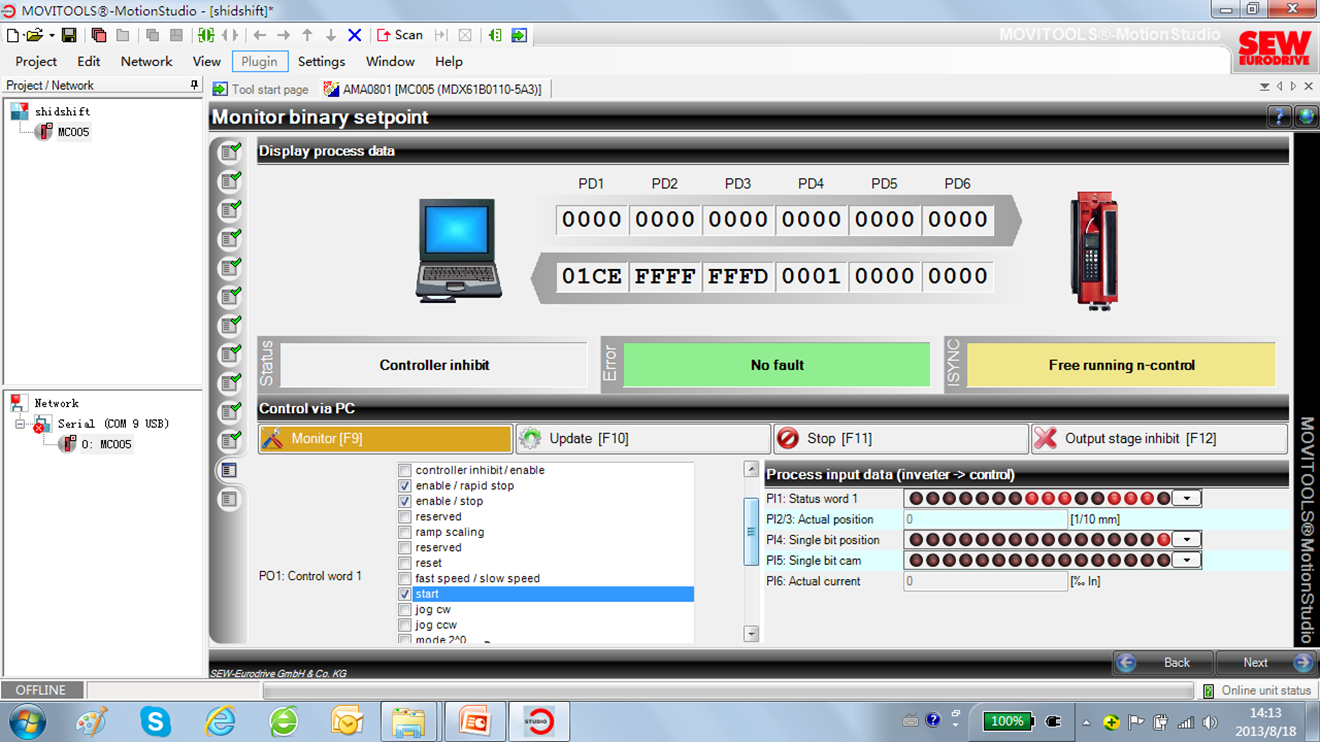
42、连接控制器X13/DIΦΦ“控制器禁止”端子的二进制输入(若使用控制器X13/DIΦ1“ENABLE/STOP”端子,同时需连接其二进制输入),选择控制信号进行模拟总线控制,测试转台;
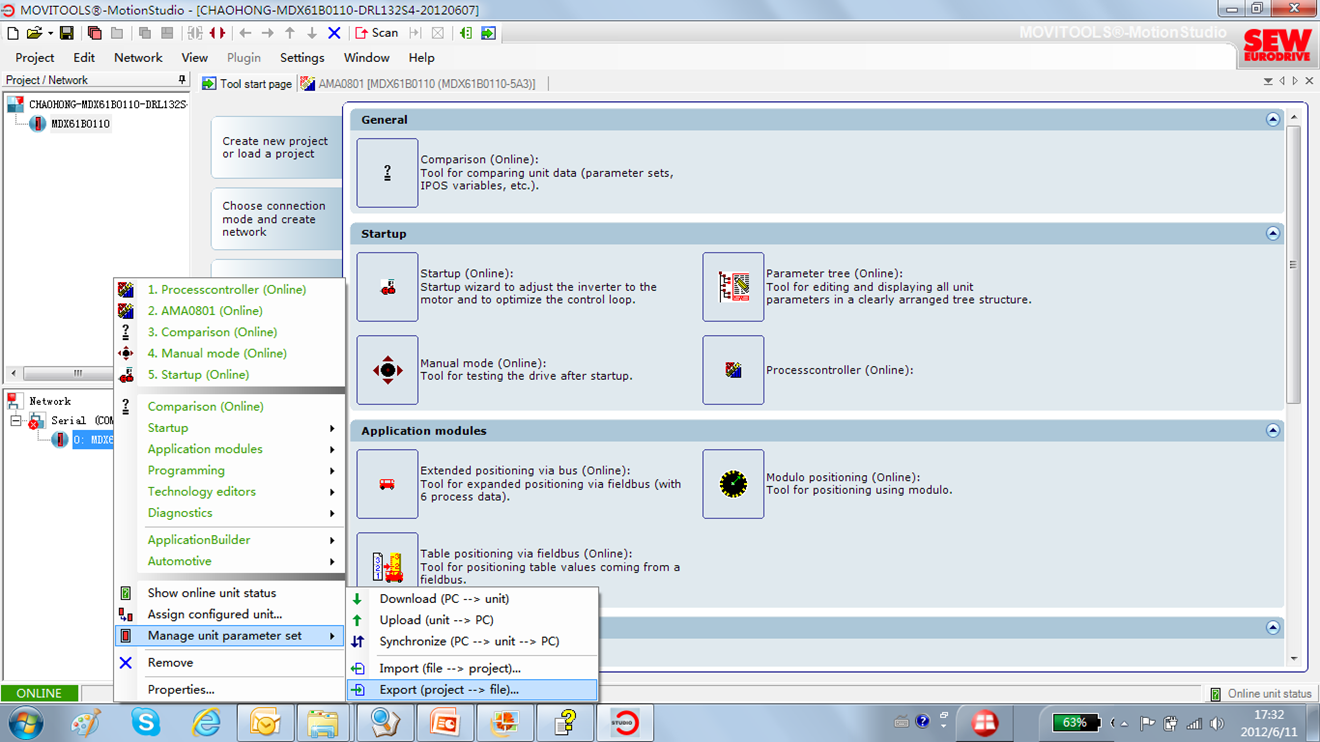
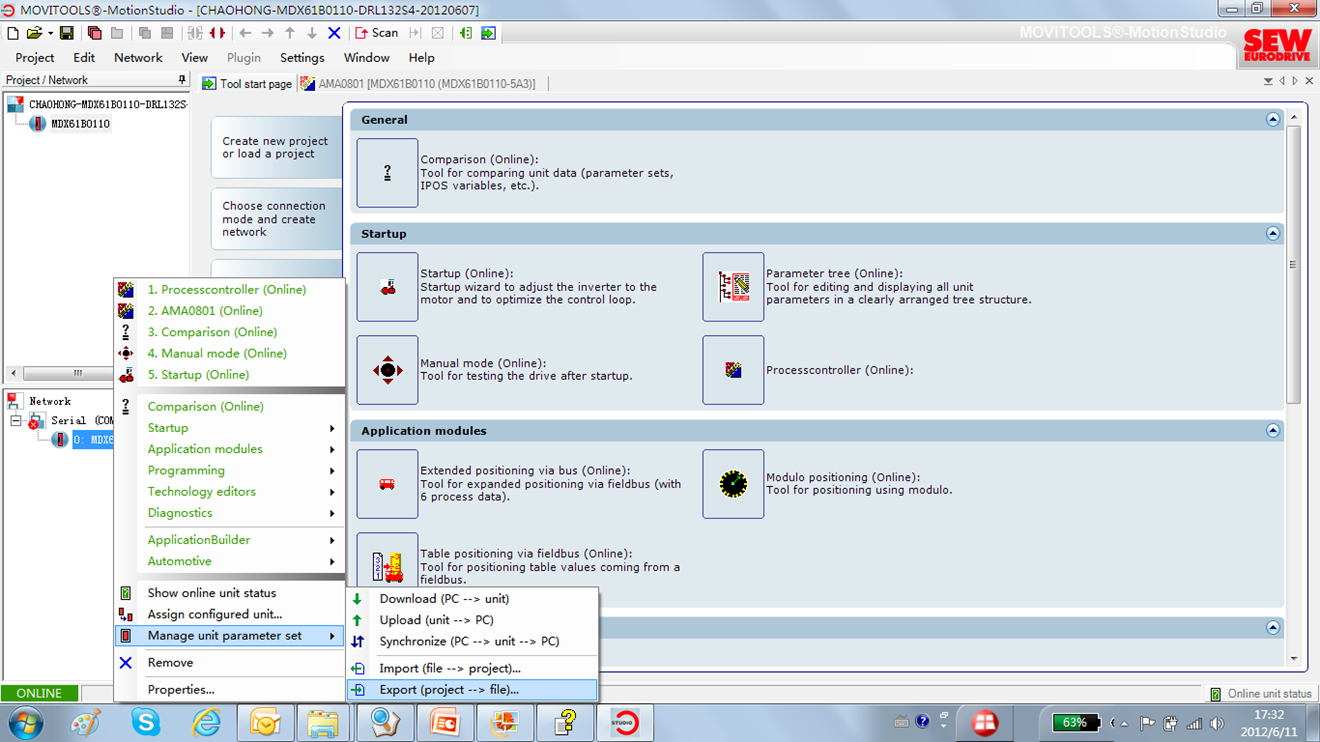
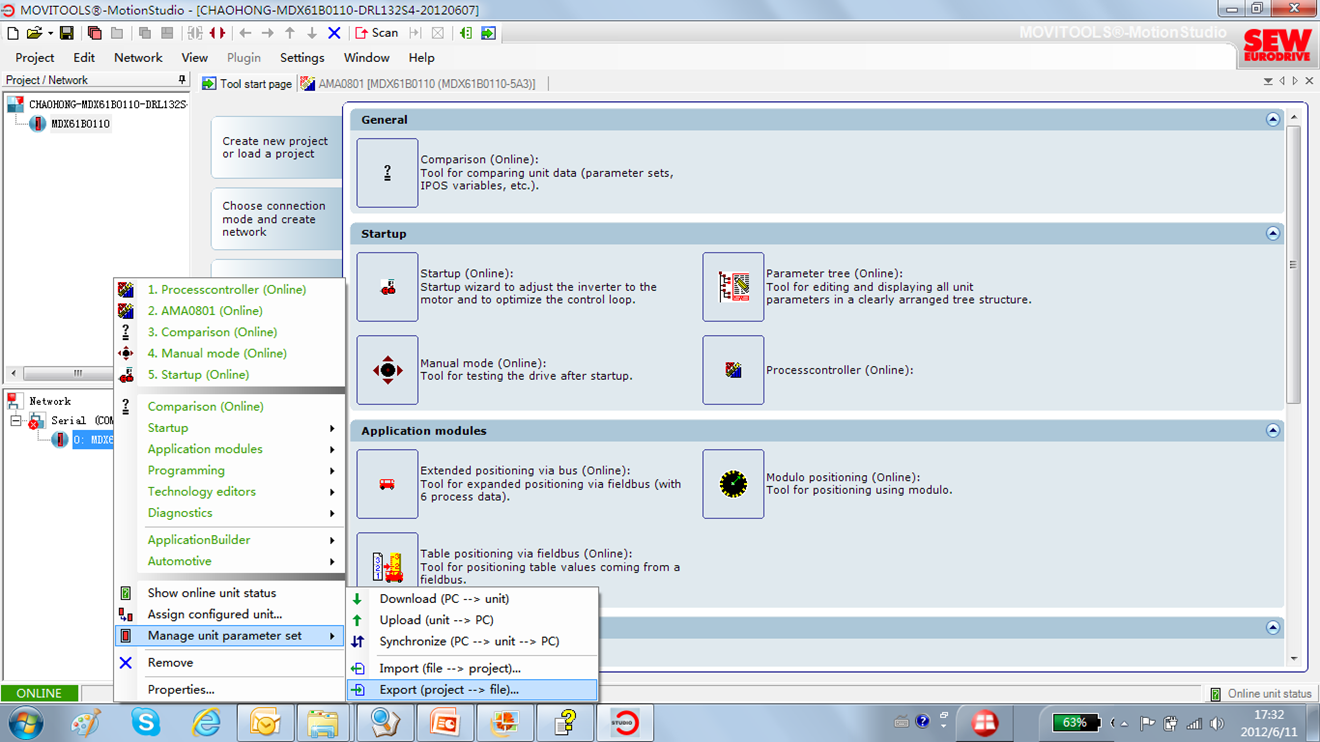
43、模拟总线控制正常后,退出此模式。选择“Export”,将配置的参数导出到文件,之后可将其导入到相似的控制系统中;
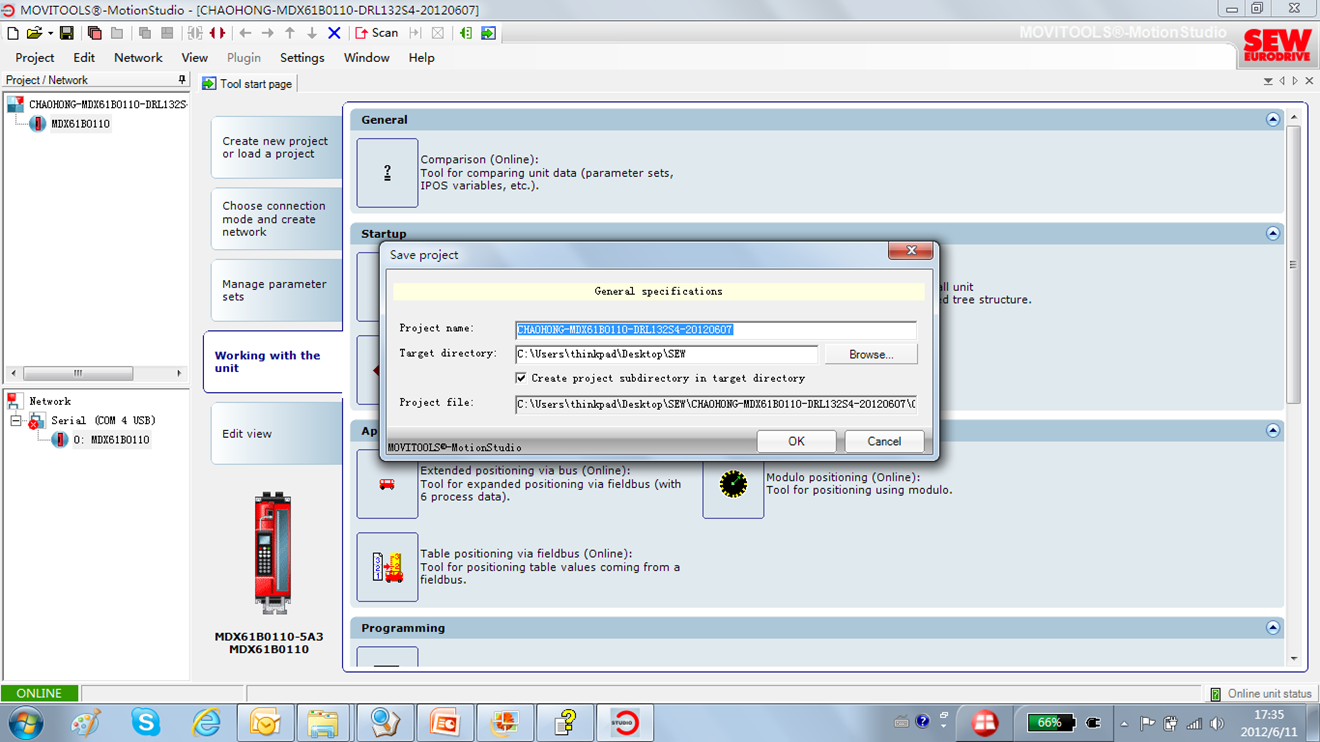
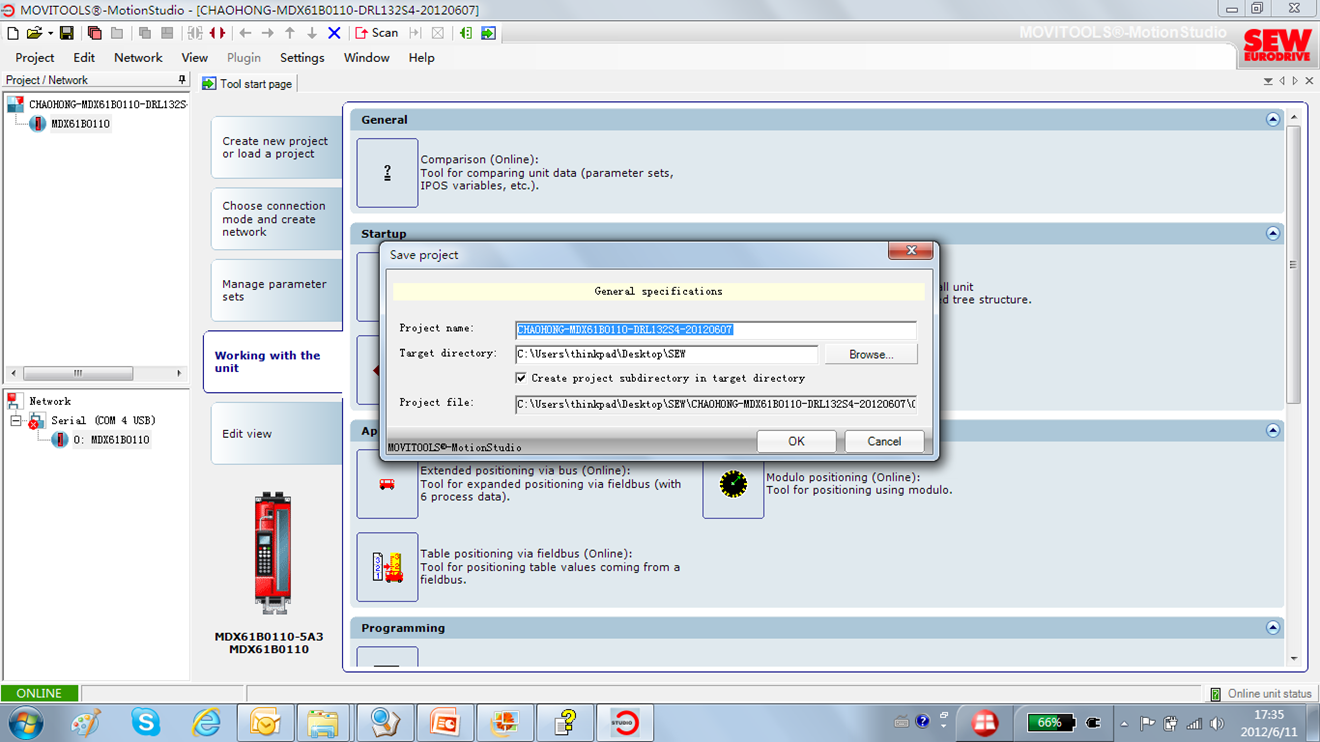
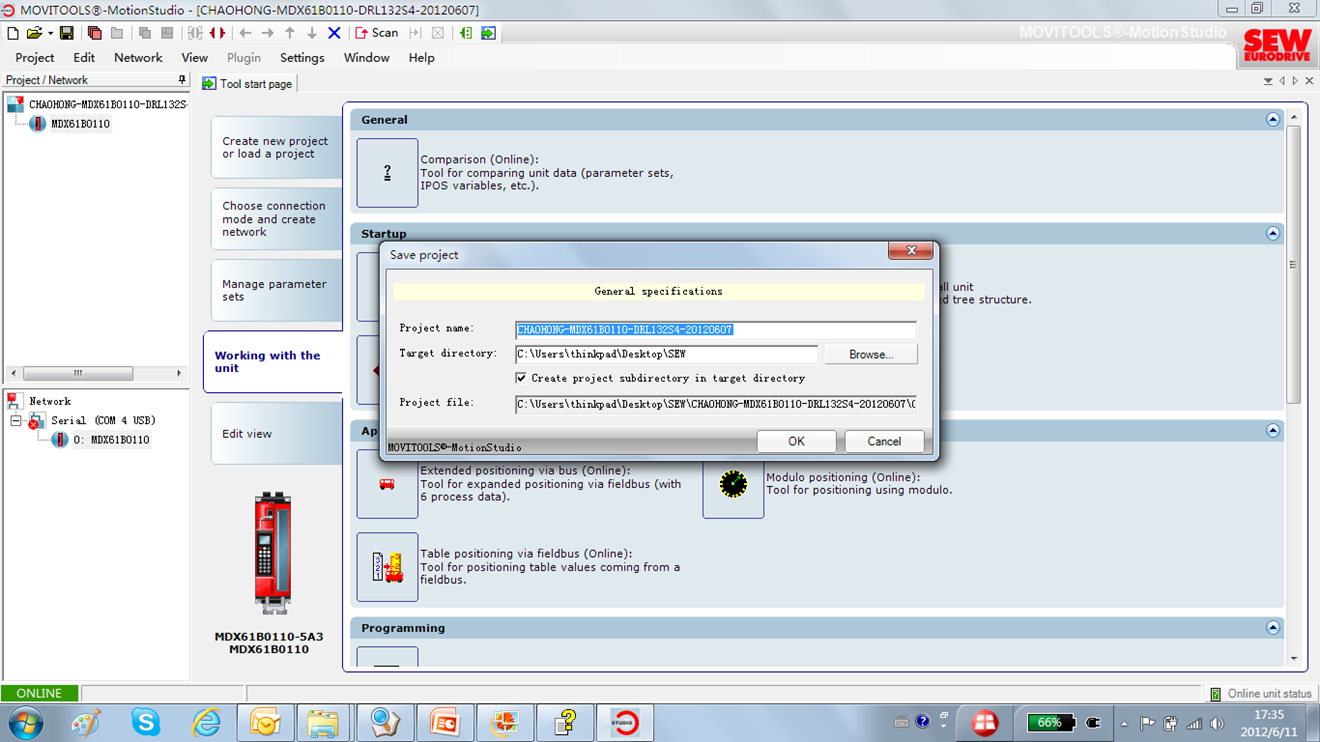
44、可选择“project > save(as)”,保存项目;
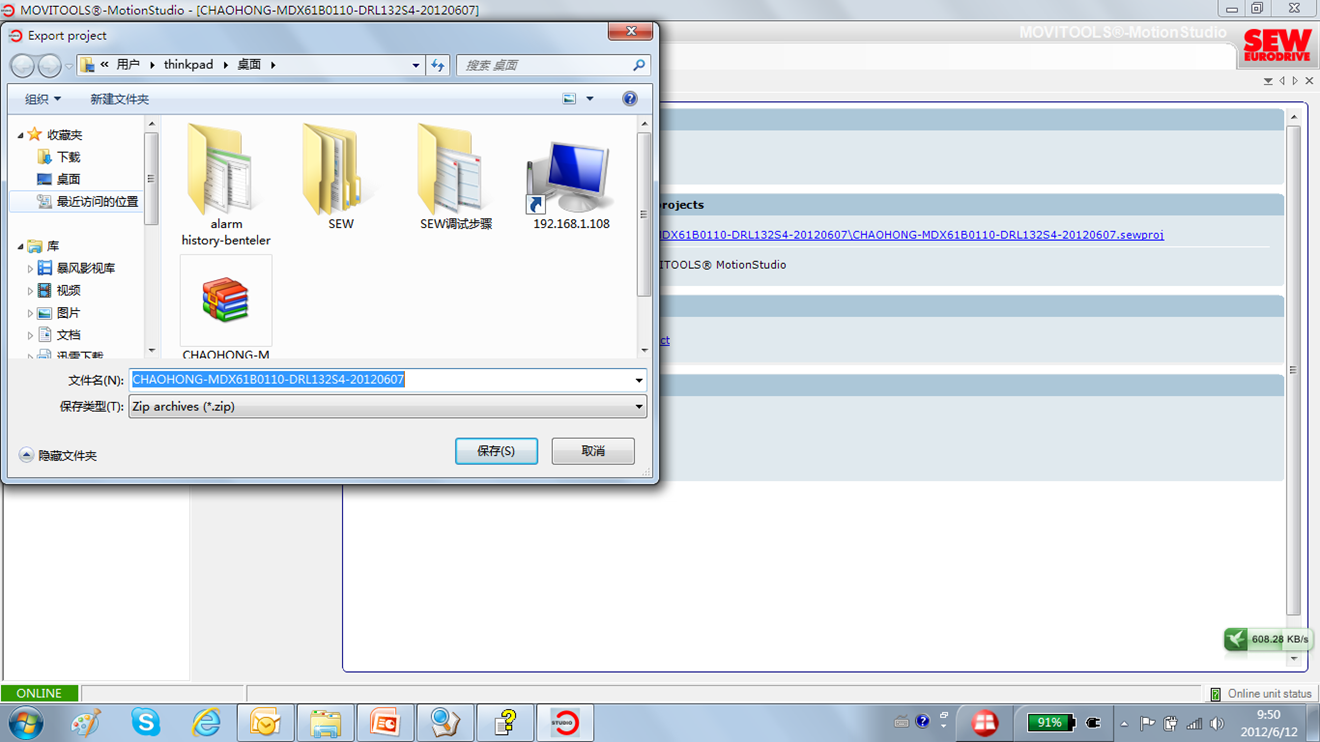
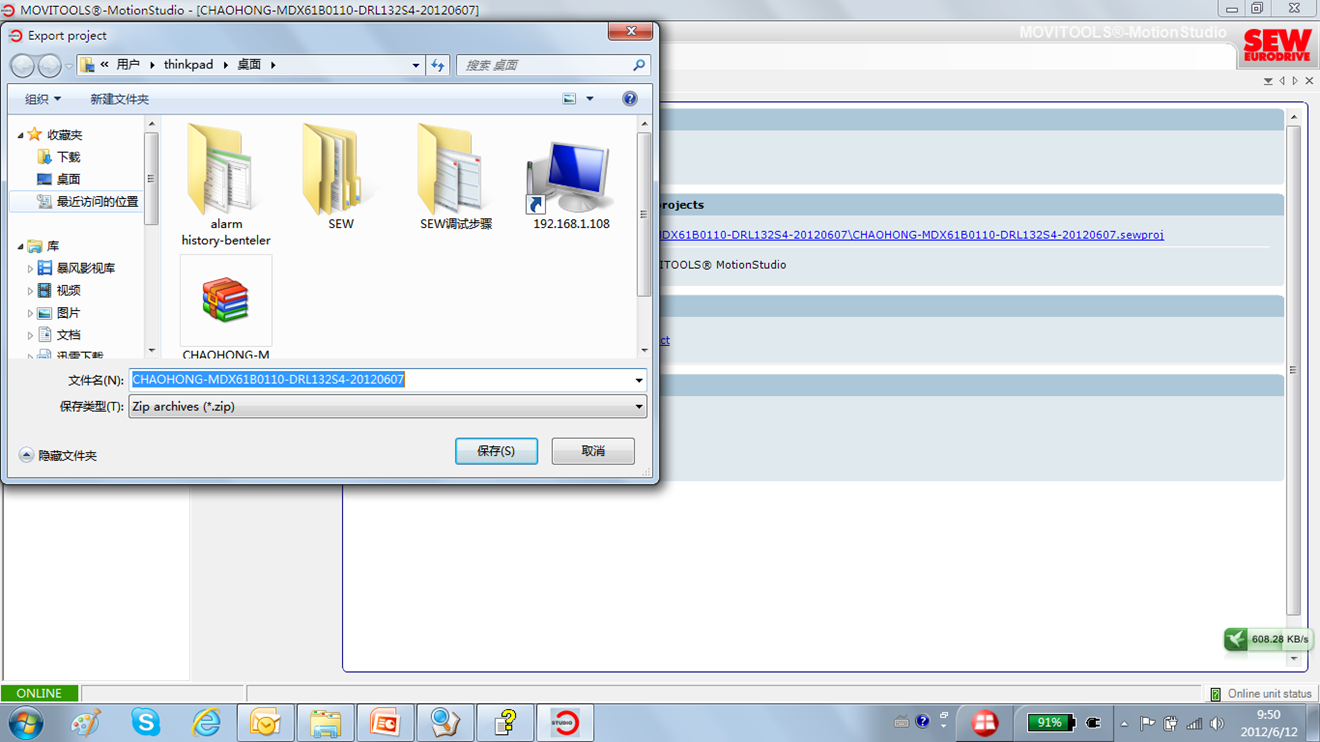
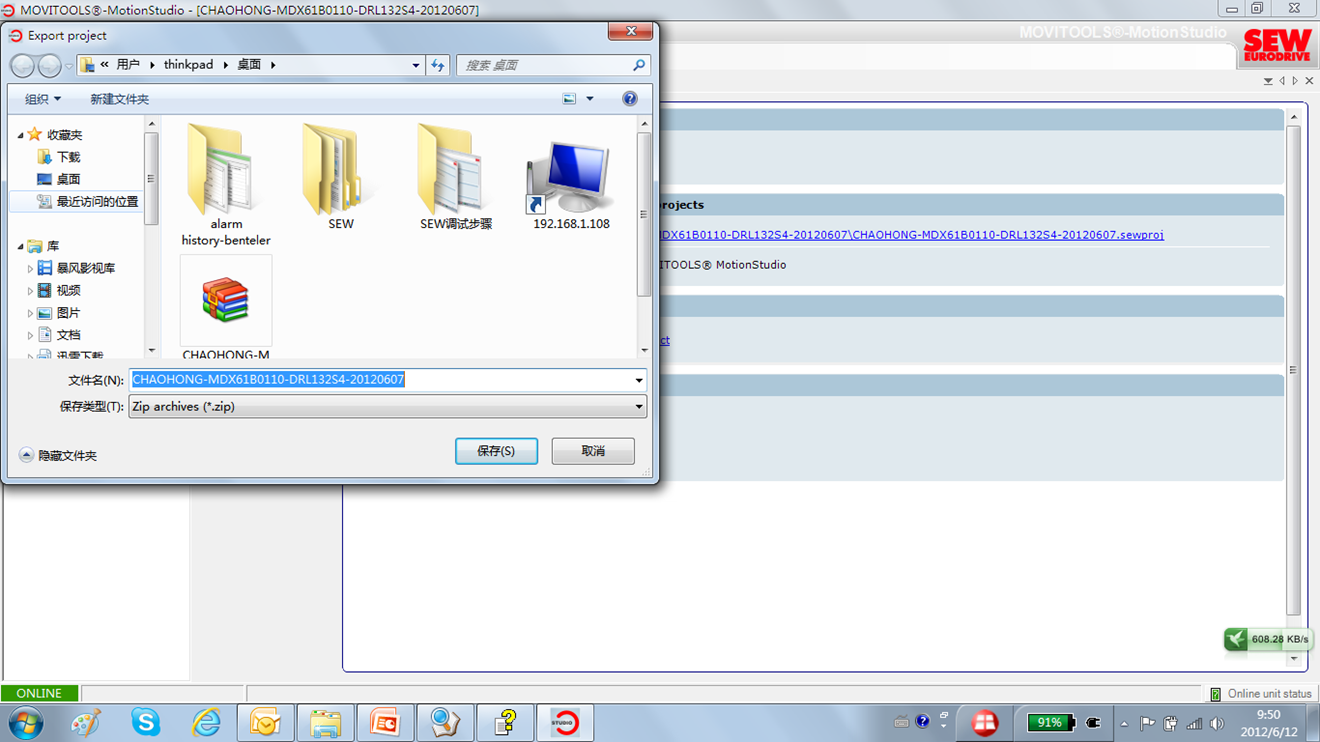
45、可选择“project > export”,导出项目到压缩文件;
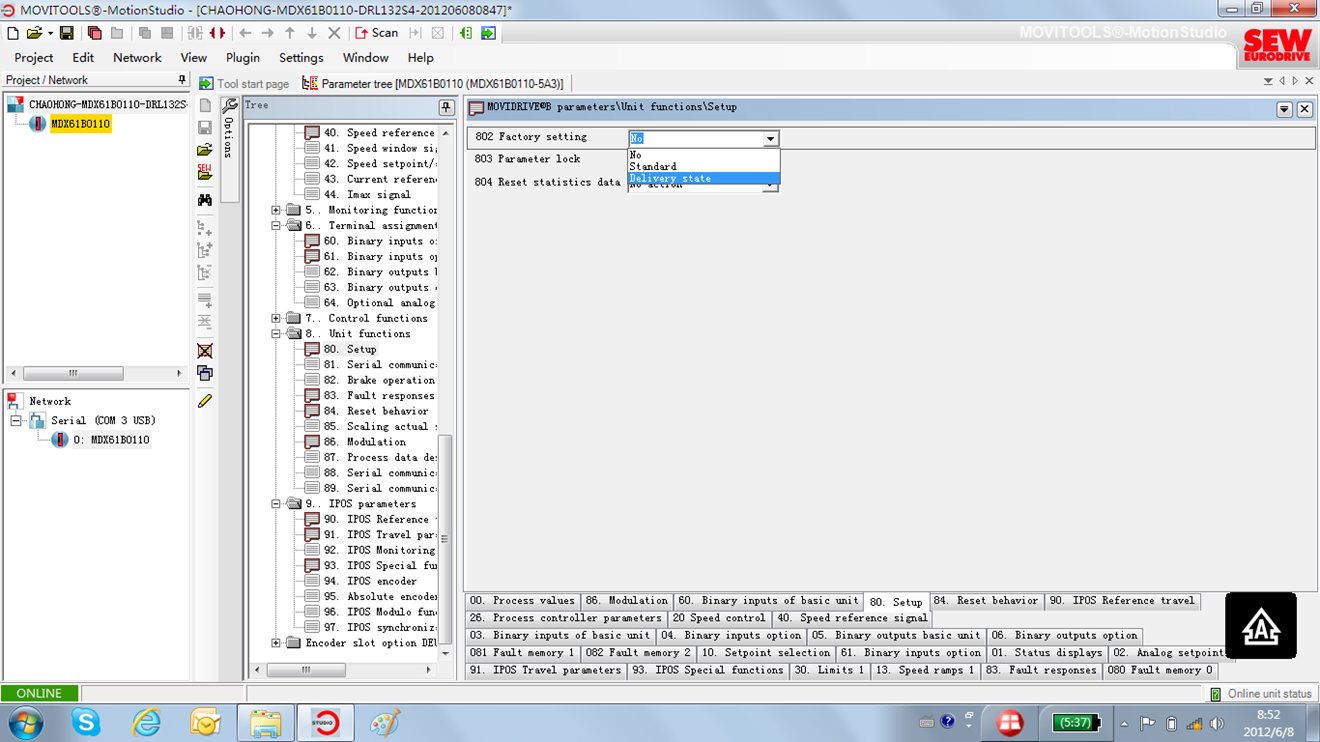
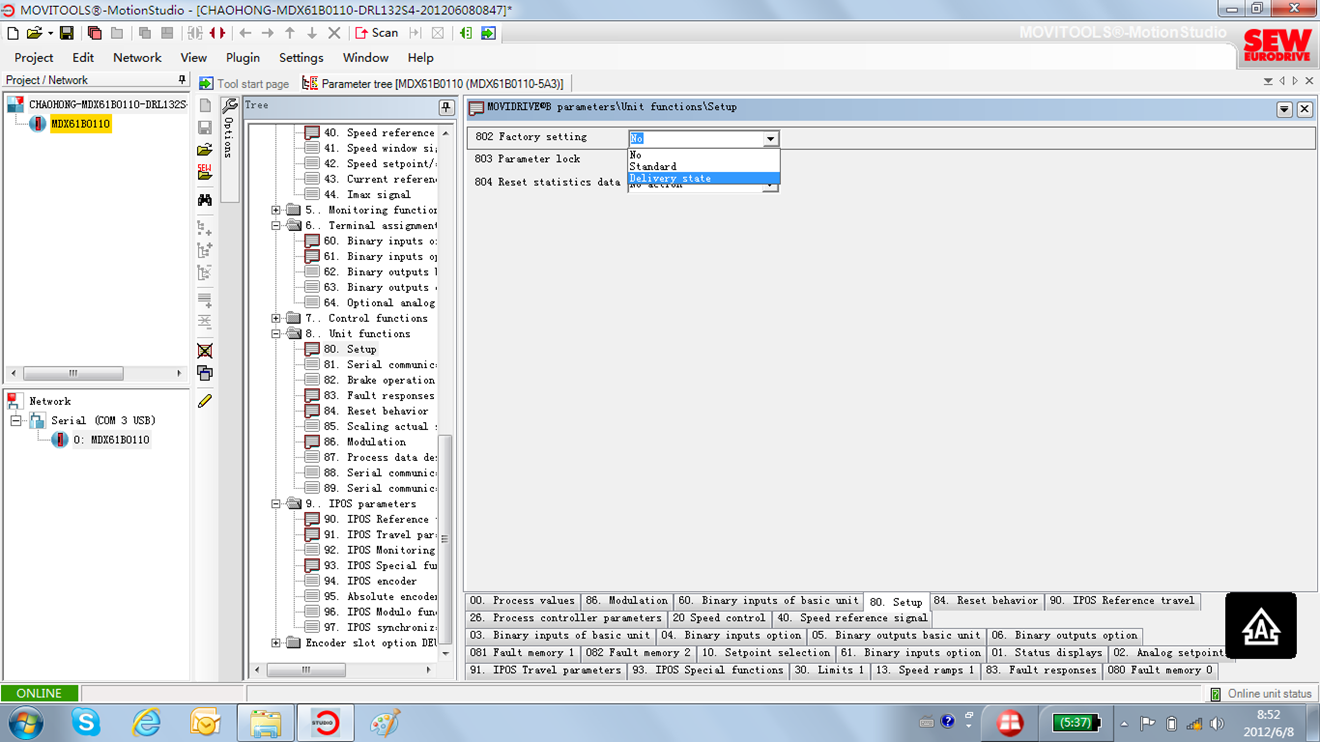
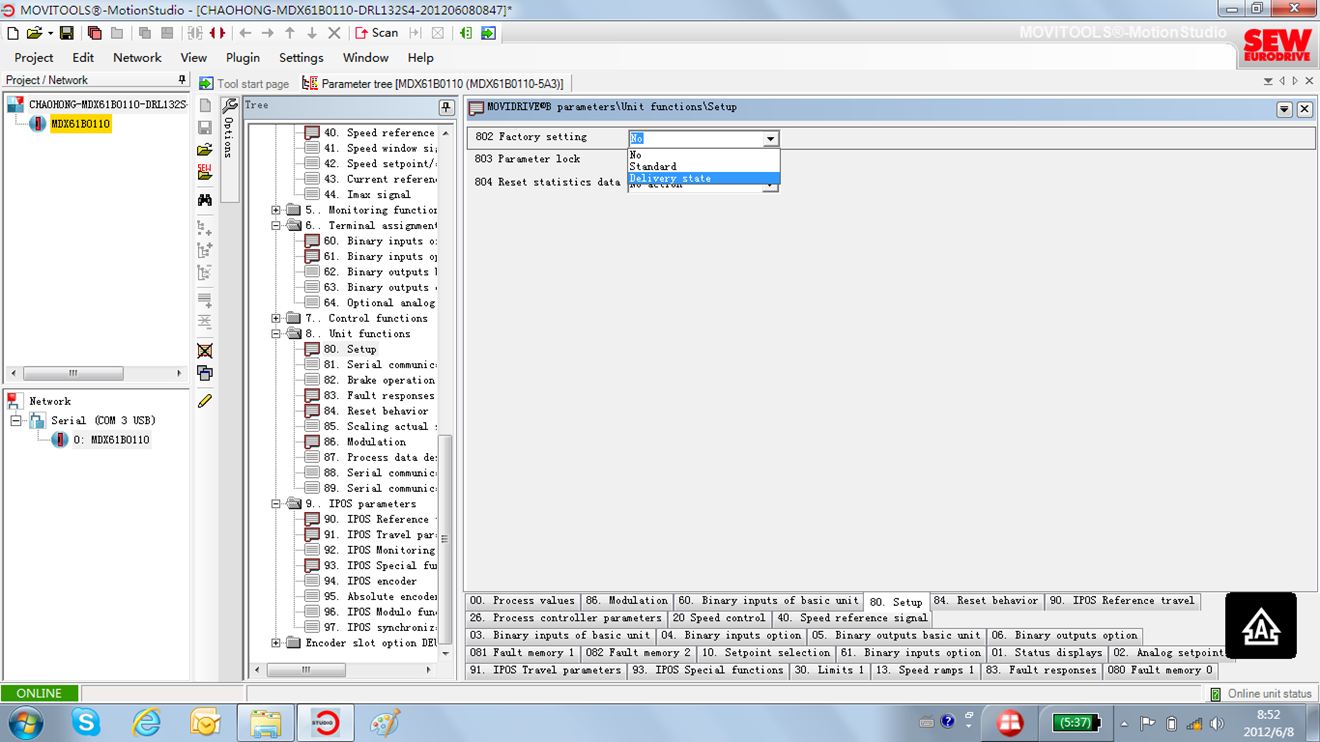
46、若后期设备应用有更改,需初始化控制器,可在“parameter tree”P802中选择“delivery state”,将控制器还原为出厂状态。
binary setpoint-0801
32、创建AMA0801模块;
33、去除控制器X13/DIΦΦ“控制器禁止”端子的二进制输入,点击“next”,开始初始化AMA0801模块;
34、总线参数和控制器配置页面,application mode选择“binary setpoint”,其它建议使用其默认参数;
35、刻度计算页面,“Diameter/spindle pitch”的单位选择“inc”;
36、参数和极限页面,若使用硬件限位开关,需将CW和CCW限位开关分别接到控制器X13/DI Φ 4和X13/DI Φ 5端子,同时在软件上选择“YES”,“parameter tree”中将P603和P604端子功能设置为相应的限位功能;如果没有原点传感器,寻找参考点模式选择5,即将当前点作为原点;
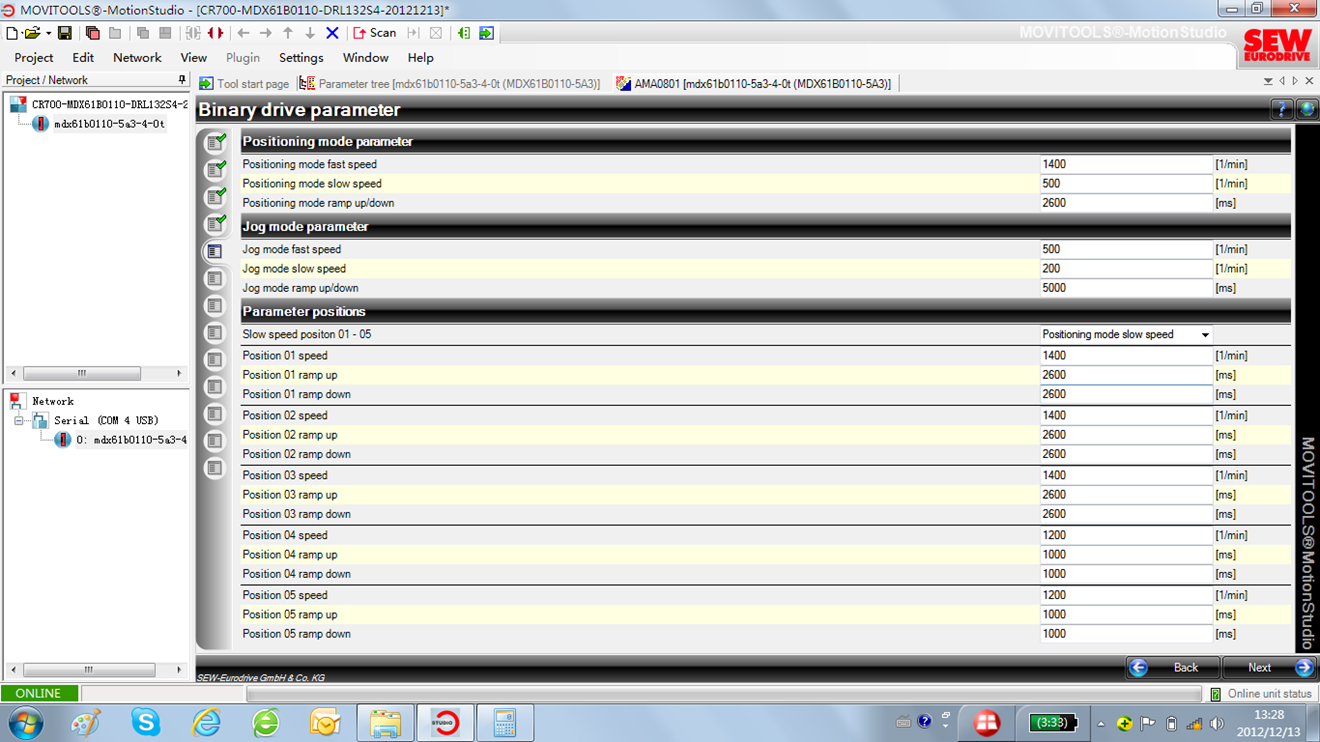
37、binary drive parameter页面, positioning mode parameter菜单下设置定位模式高速,低速及加减速时间。Jog mode菜单下设置点动模式高速,低速及加减速时间(默认即可)。Parameter positions菜单下设置低速类型,和每个位置的速度及加减速时间;
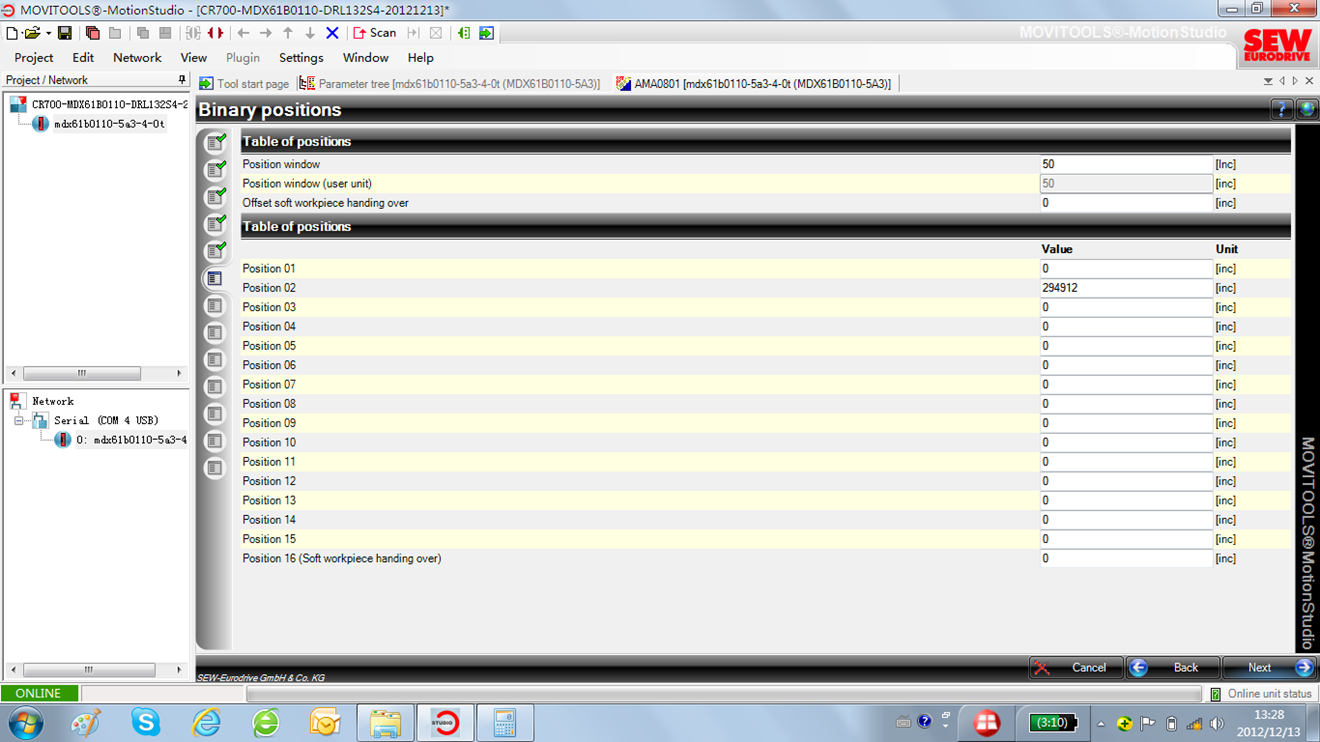
38、binary positions页面,设置定位窗口,及各个位置对应的脉冲值;
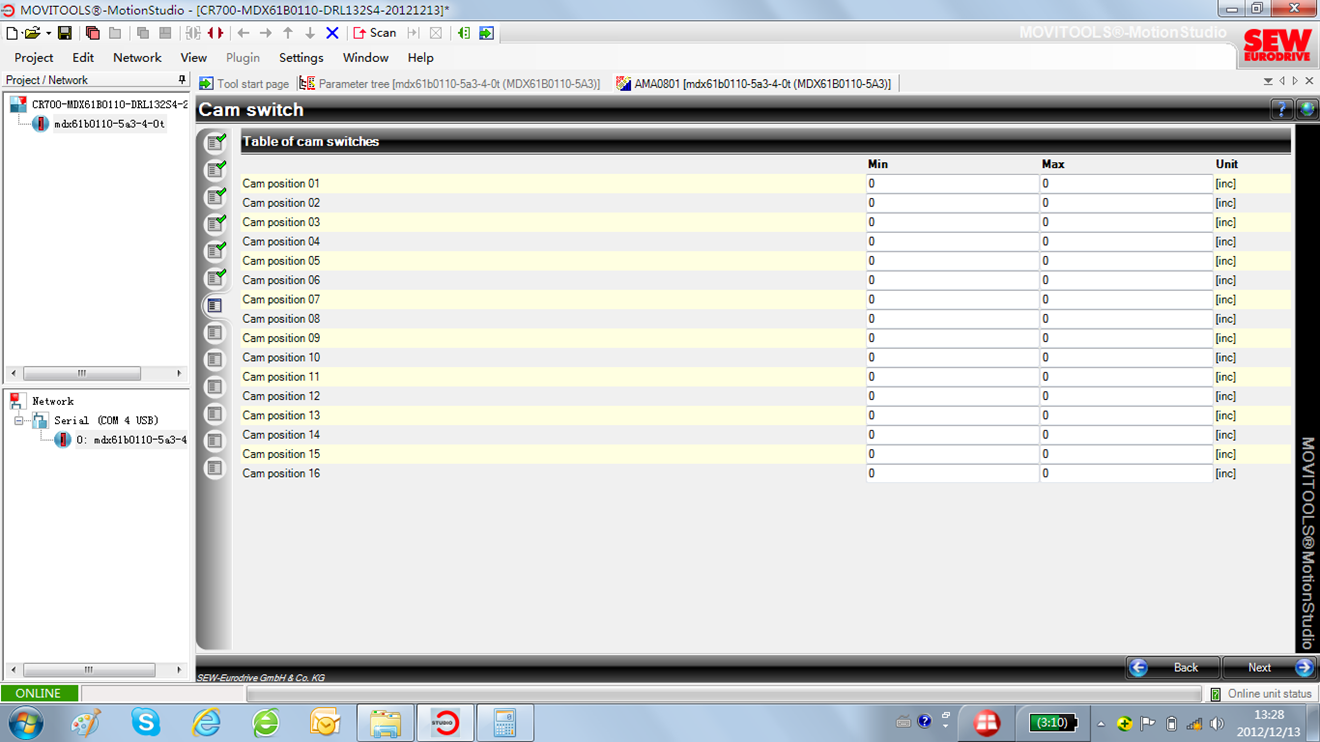
39、cam switch页面,可以根据需要设置电子凸轮输出;
40、监控设置页面,建议使用其默认参数;
41、点击“download”,将AMA模块设置下载到控制器;
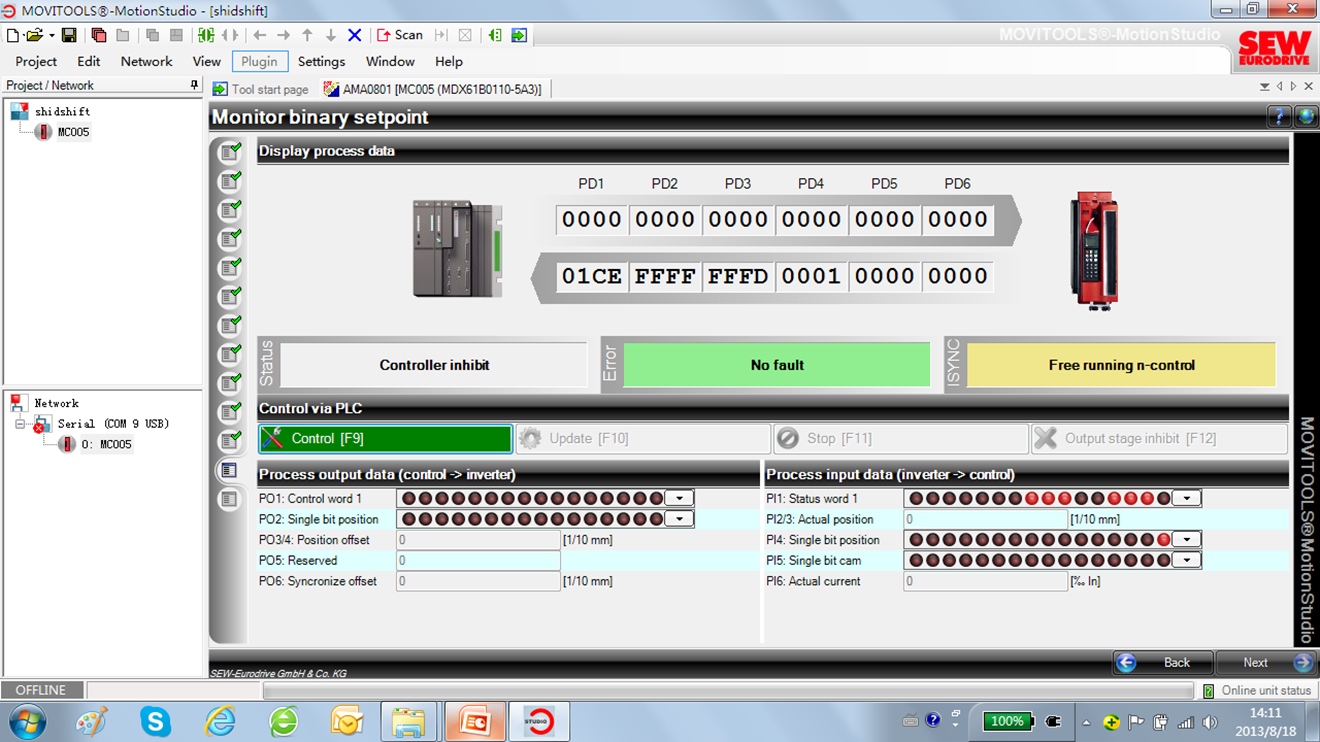
42、下载完成后,软件自动跳至总线控制监视器;
43、更改二进制输入设置,若不使用二进制输入控制X13/DI Φ 1“ENABLE/STOP”,必须将“parameter tree”中P600设为“NO FUNCTION”,若不使用原点传感器,将P602“Reference Cam”设为“NO FUNCTION”,若不使用硬件限位开关,将P603和P604设为“NO FUNCTION”;
44、点击“control”,确定弹出对话框;
45、连接控制器X13/DIΦΦ“控制器禁止”端子的二进制输入(若使用控制器X13/DIΦ1“ENABLE/STOP”端子,同时需连接其二进制输入),选择控制信号进行模拟总线控制,运转转台;
46、模拟总线控制正常后,退出此模式。选择“Export”,将配置的参数导出到文件,之后可将其导入到相似的控制系统中;
47、可选择“project > save(as)”,保存项目;
48、可选择“project > export”,导出项目到压缩文件;
49、若后期设备应用有更改,需初始化控制器,可在“parameter tree”P802中选择“delivery state”,将控制器还原为出厂状态。
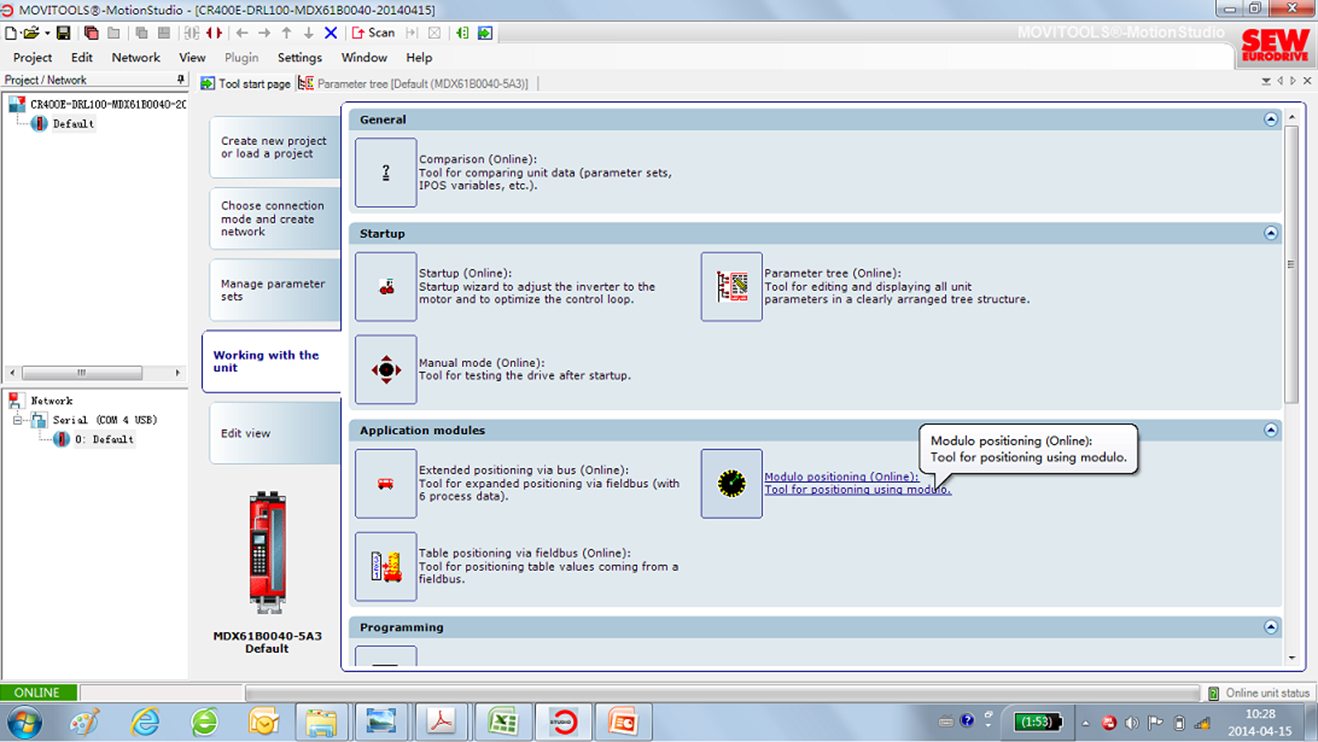
modulo positioning-0801
32、去除控制器X13/DIΦΦ“控制器禁止”端子的二进制输入,开始创建modulo positioning定位模块;
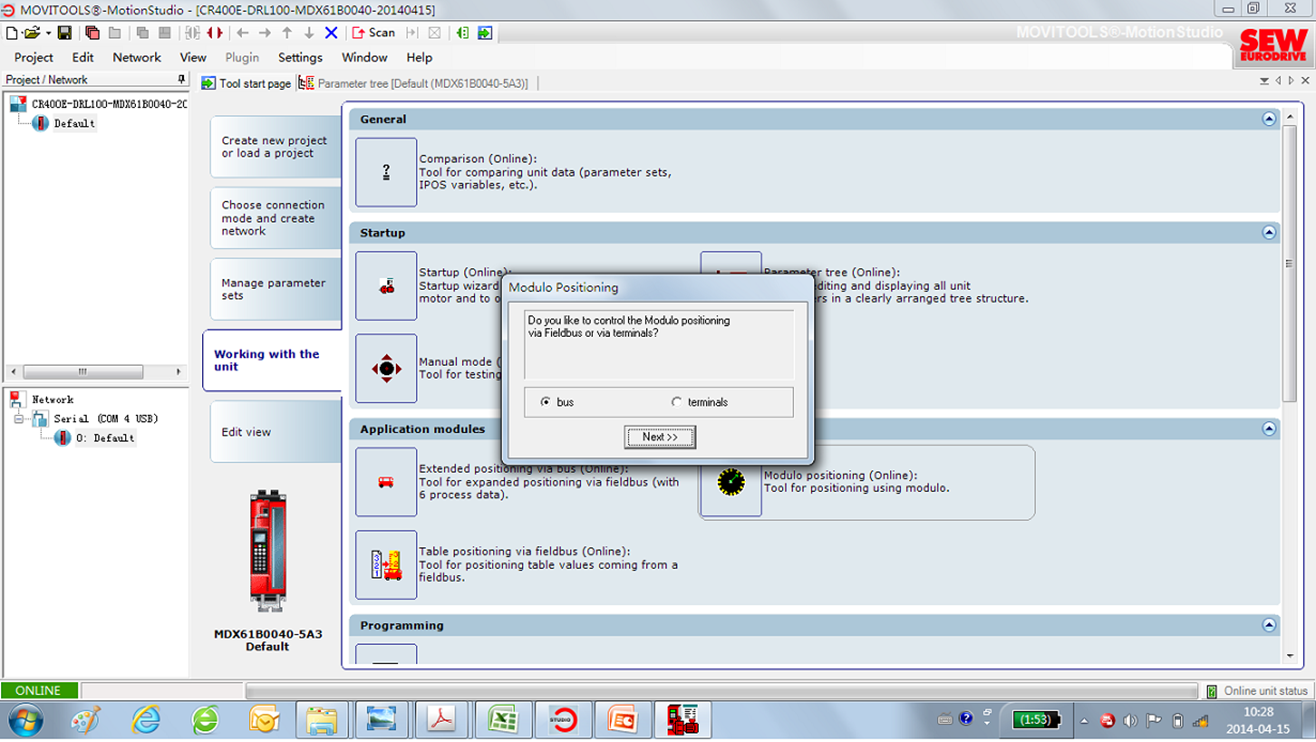
33、上位机若为总线控制,选择“bus”;若为I/O端子控制,选择“terminals”;
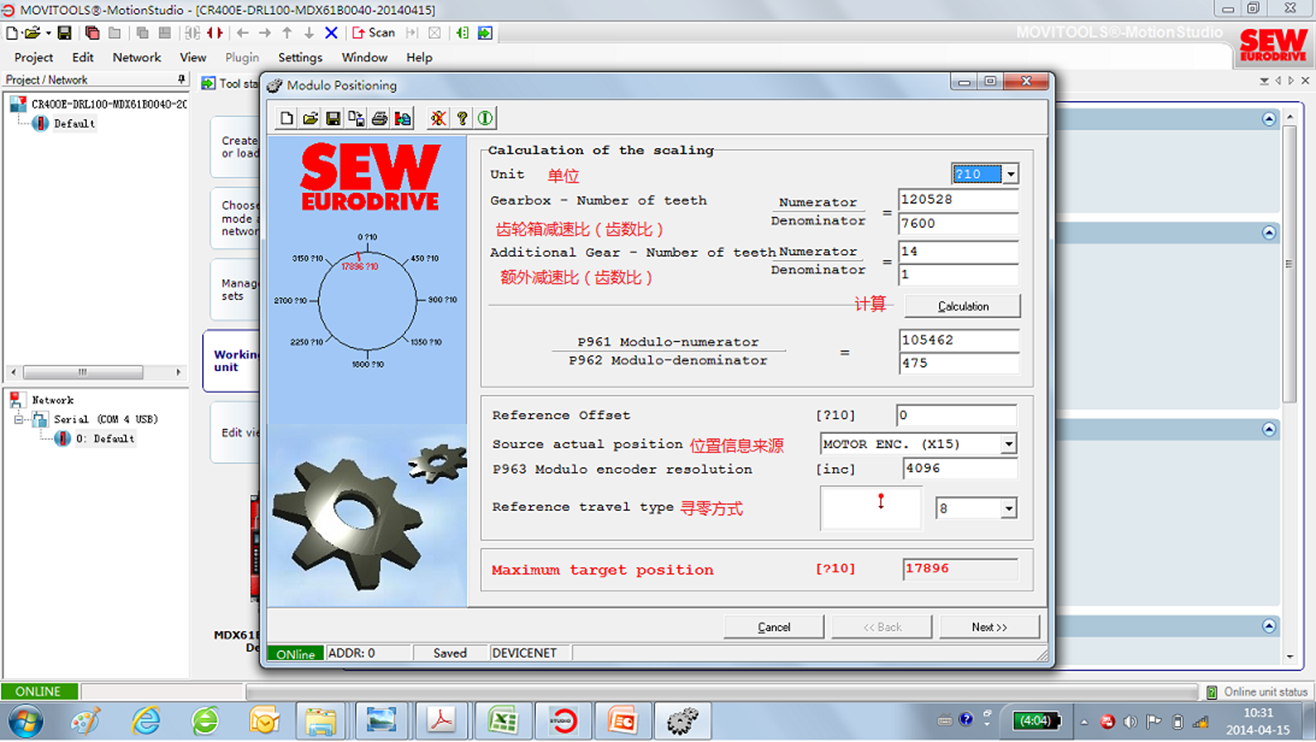
34、选择角度单位(脉冲/度/0.1度三种可选);输入整数形式的齿轮箱和外部减速比,然后点击“caculation”;选择位置信息来源(电机编码器/外部增量式编码器/外部绝对式编码器三种可选,一般为电机编码器);选择寻零方式(5和8均为设置当前点为电气零点);
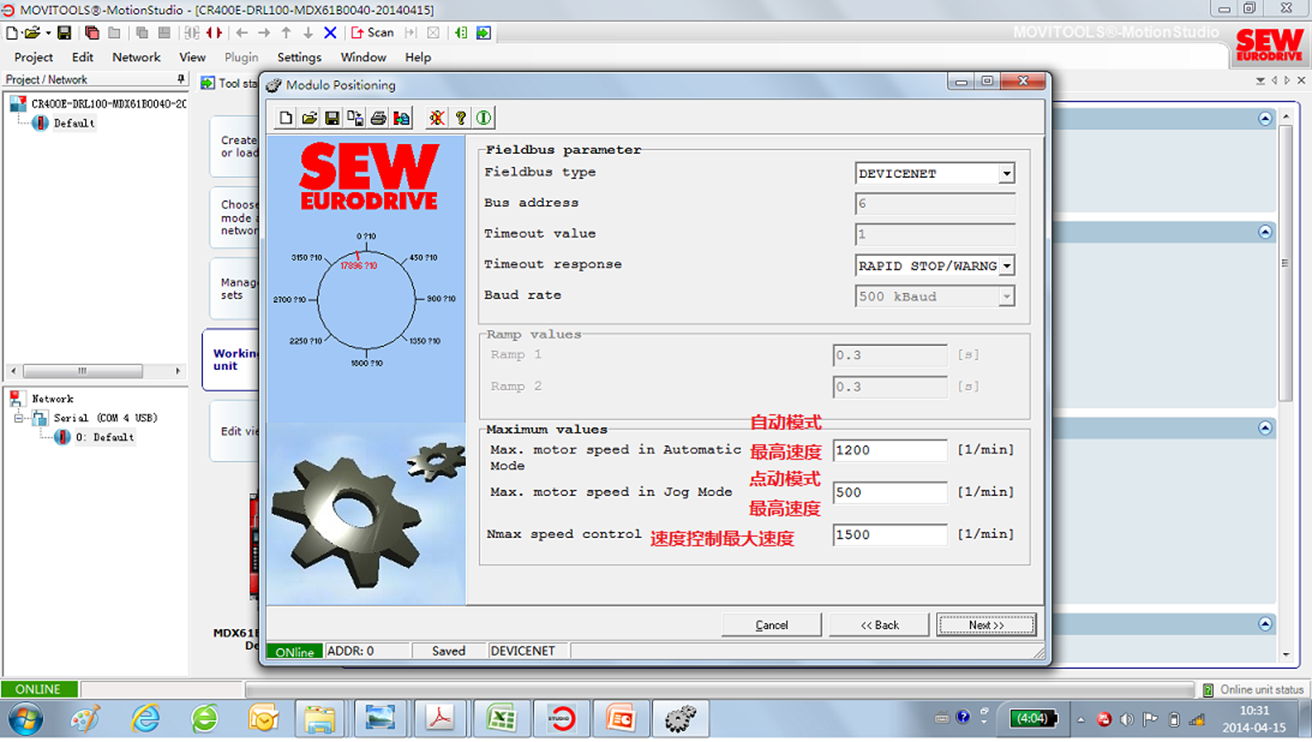
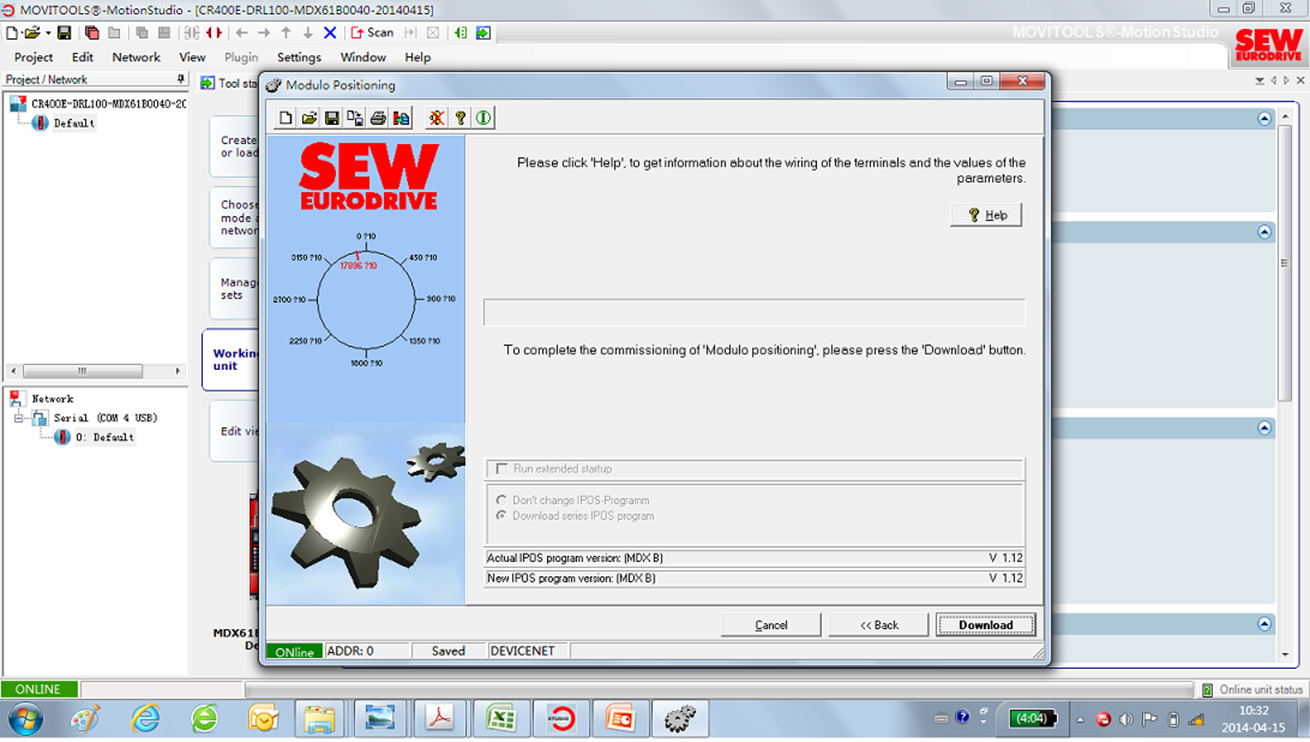
35、设置自动模式最高速度,点动模式最高速度和速度控制(所有模式)最高速度;
36、将模块下载到变频器中;
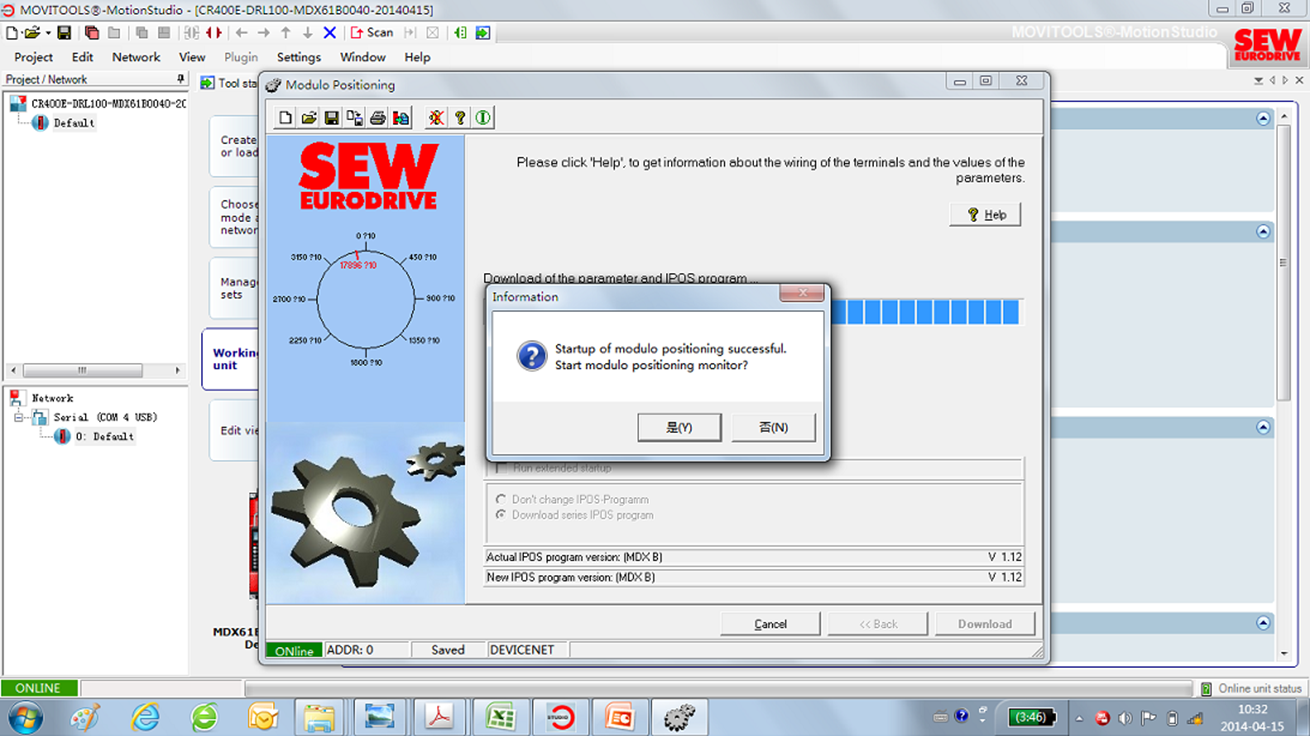
37、模块下载到变频器后,点击“是”进入模块的监视模式;
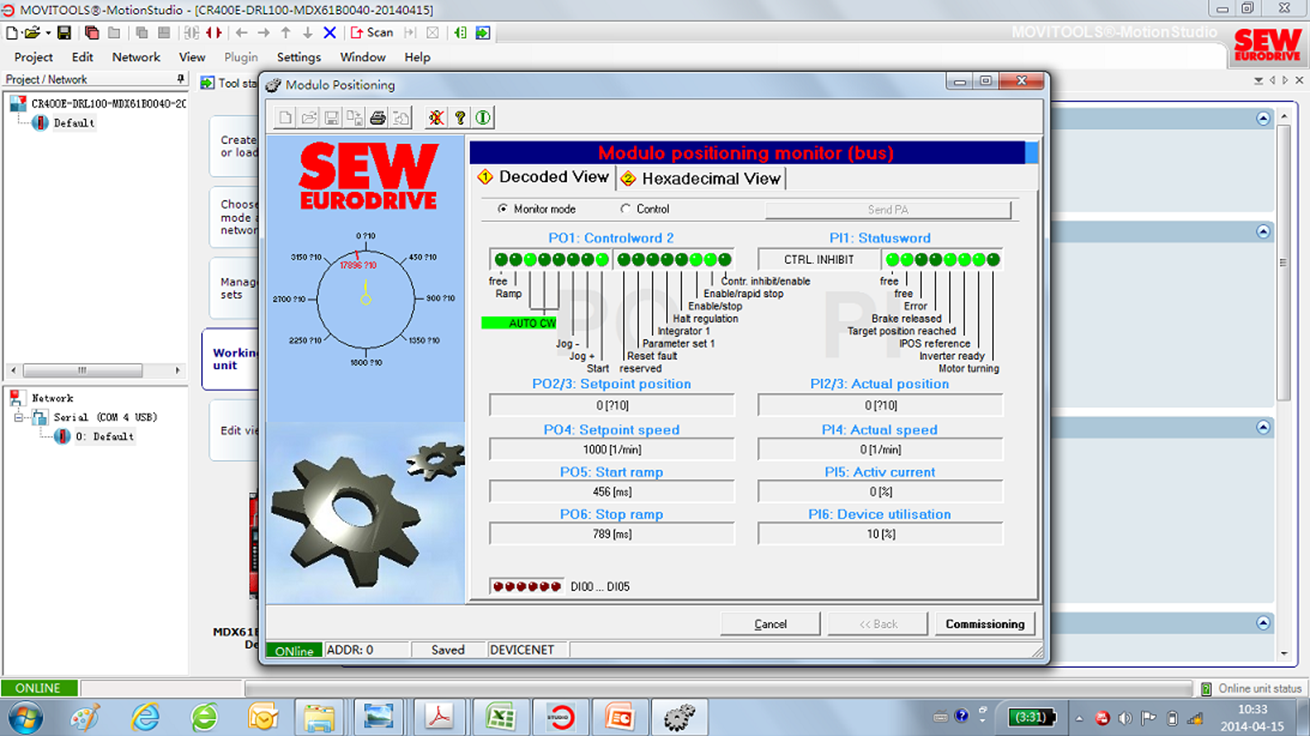
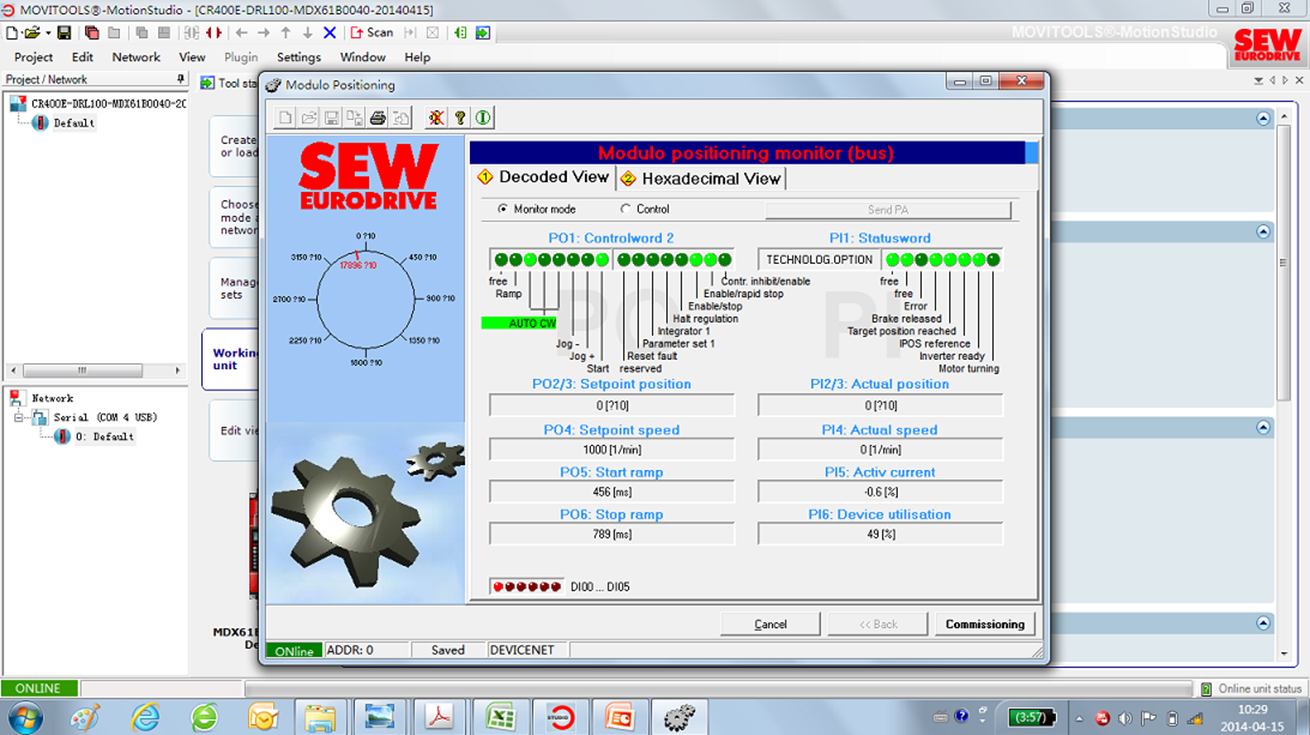
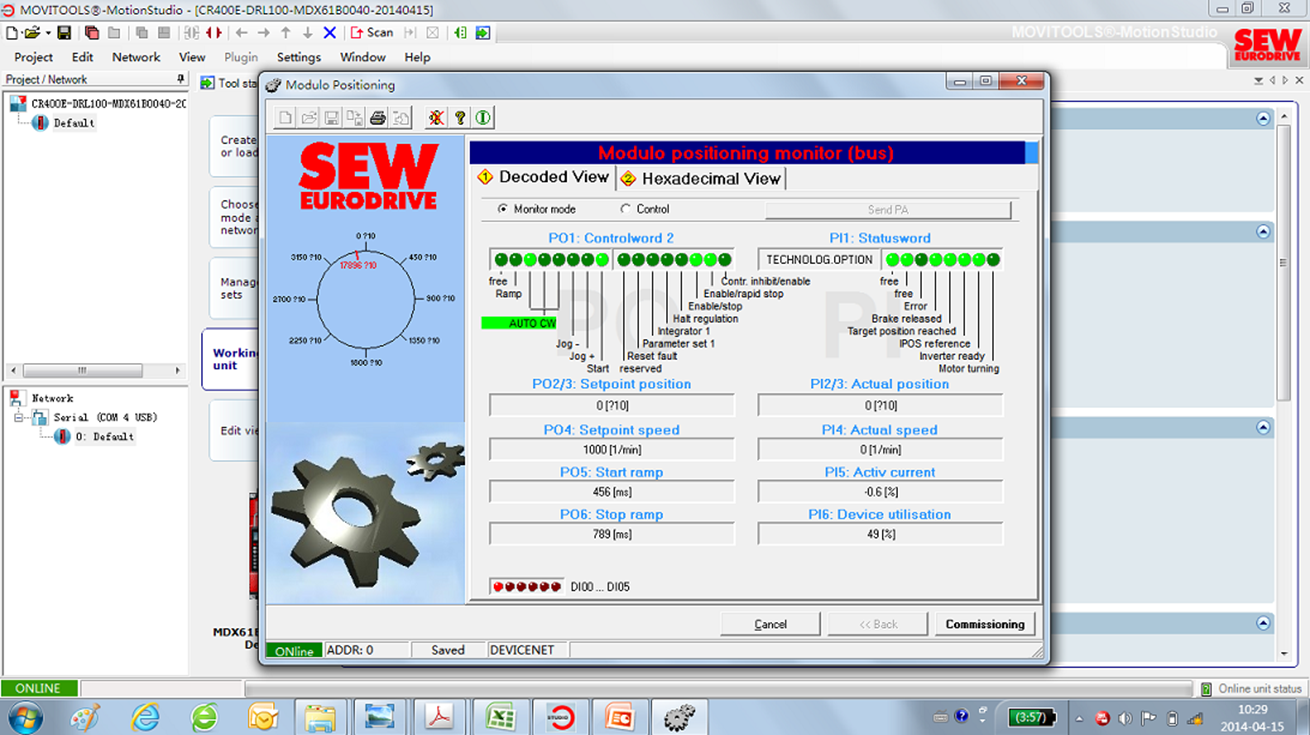
38、模块的监视画面如下。上位机发命令时,命令信息在此画面都可以监视到;
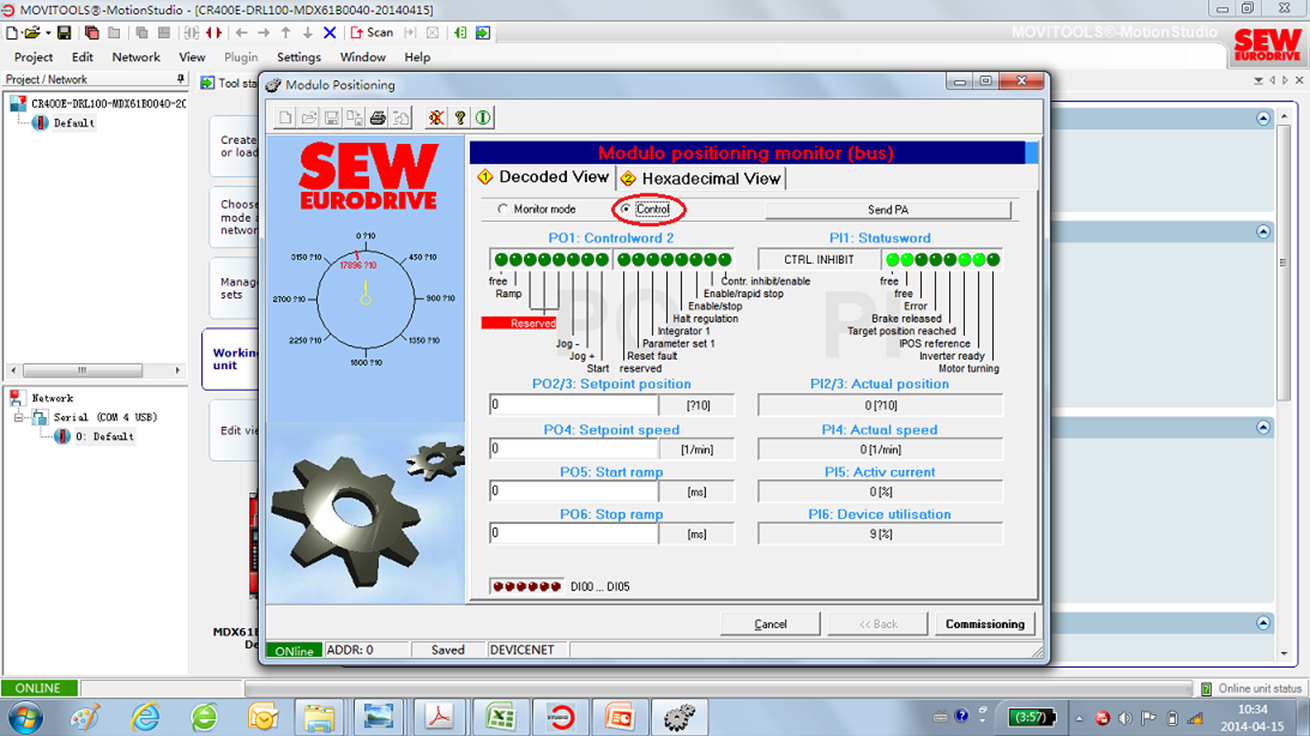
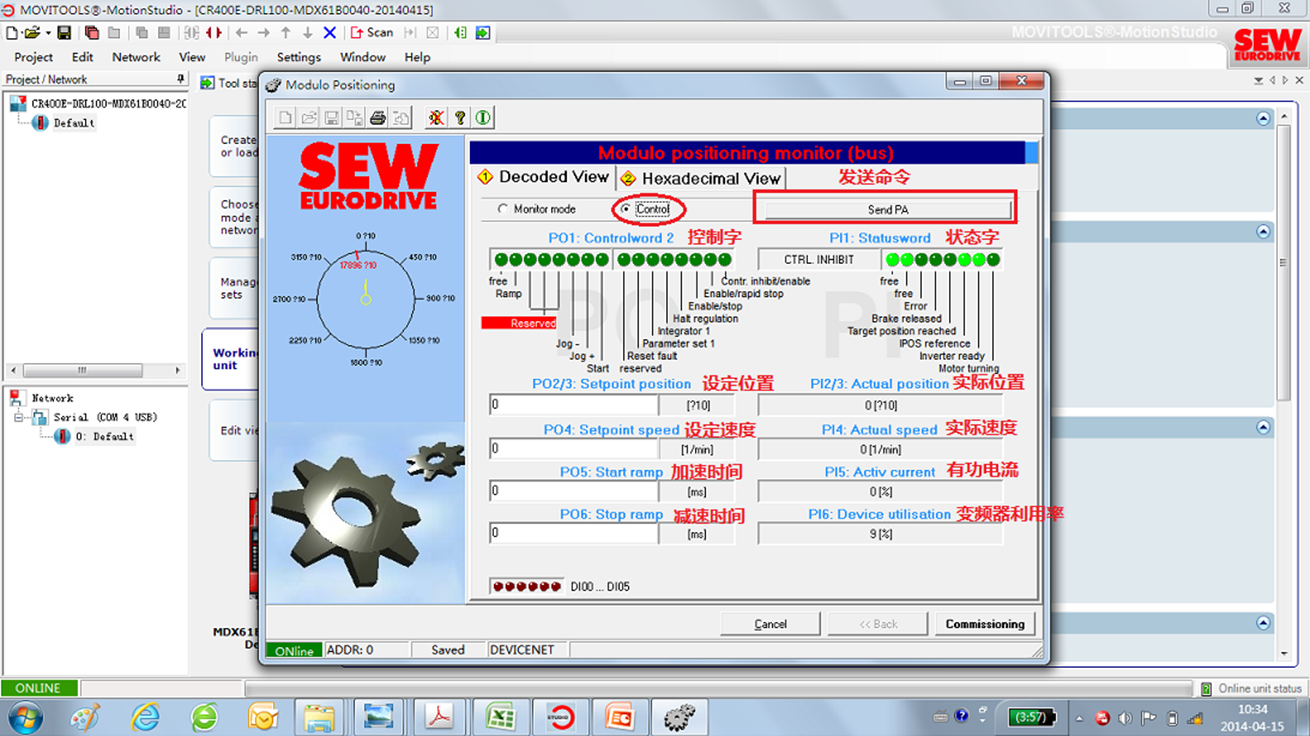
39、点击“control”,进入模块的控制模式。注意:进入控制模式后,上位机的命令就会失效;
40、更改二进制输入设置,若不使用二进制输入控制X13/DI Φ 1“ENABLE/STOP”,必须将“parameter tree”中P600设为“NO FUNCTION”,若不使用原点传感器,将P602“Reference Cam”设为“NO FUNCTION”,若不使用硬件限位开关,将P603和P604设为“NO FUNCTION”;
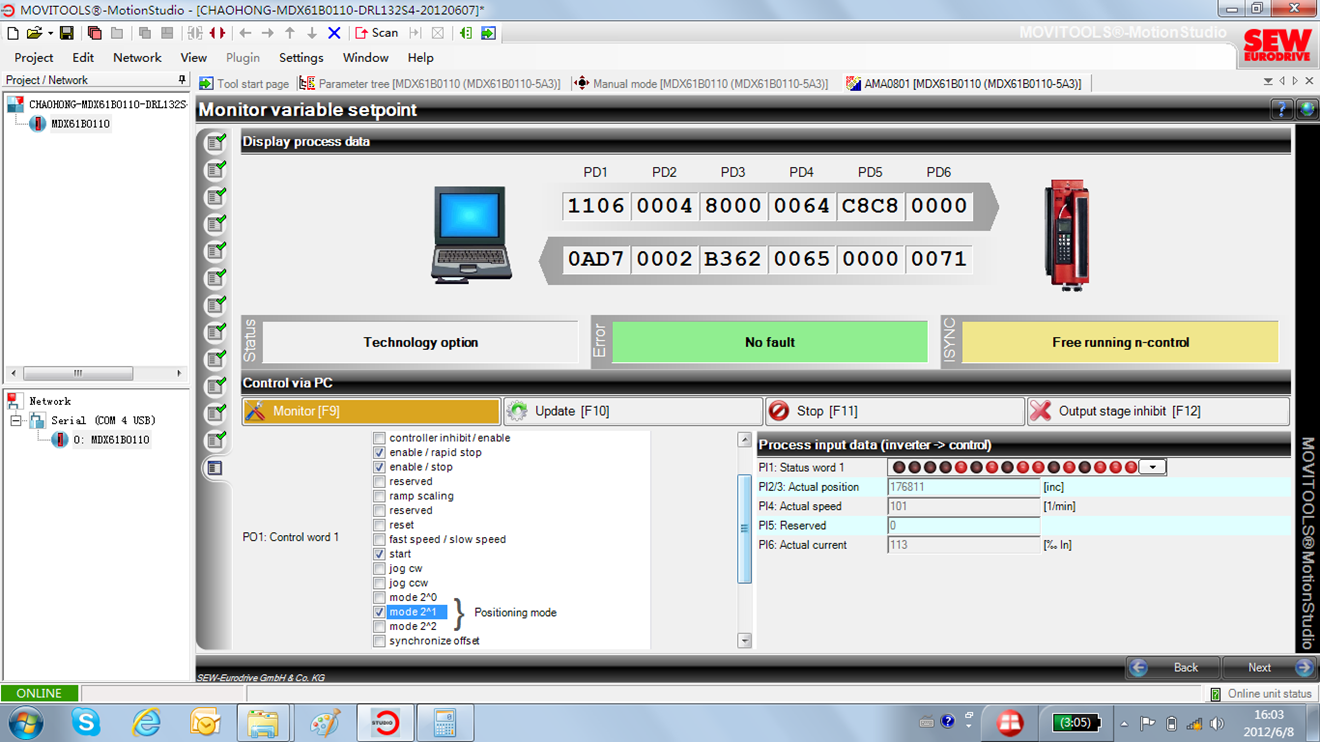
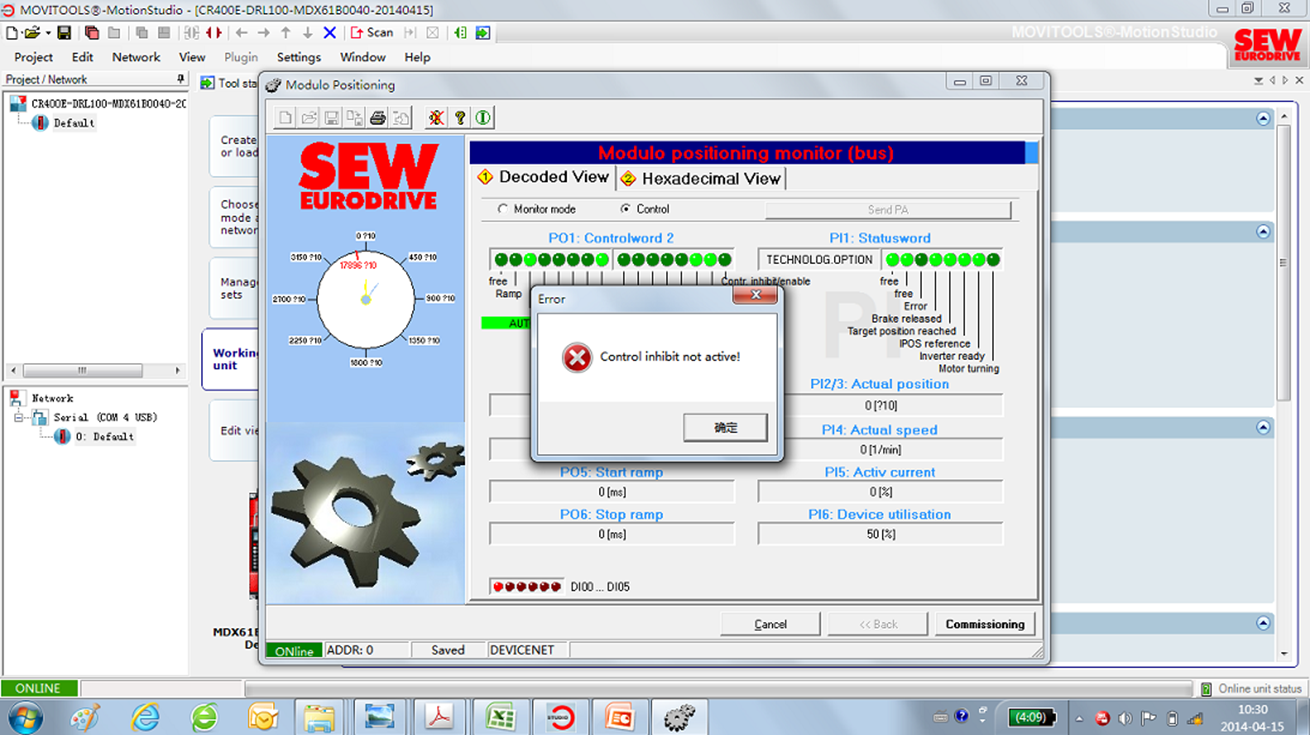
41、模块的控制画面如下。激活控制器X13/DIΦΦ“控制器禁止”端子的二进制输入,即可通过此画面编辑命令,发送命令给设备;同时设备的状态也可反馈出来;
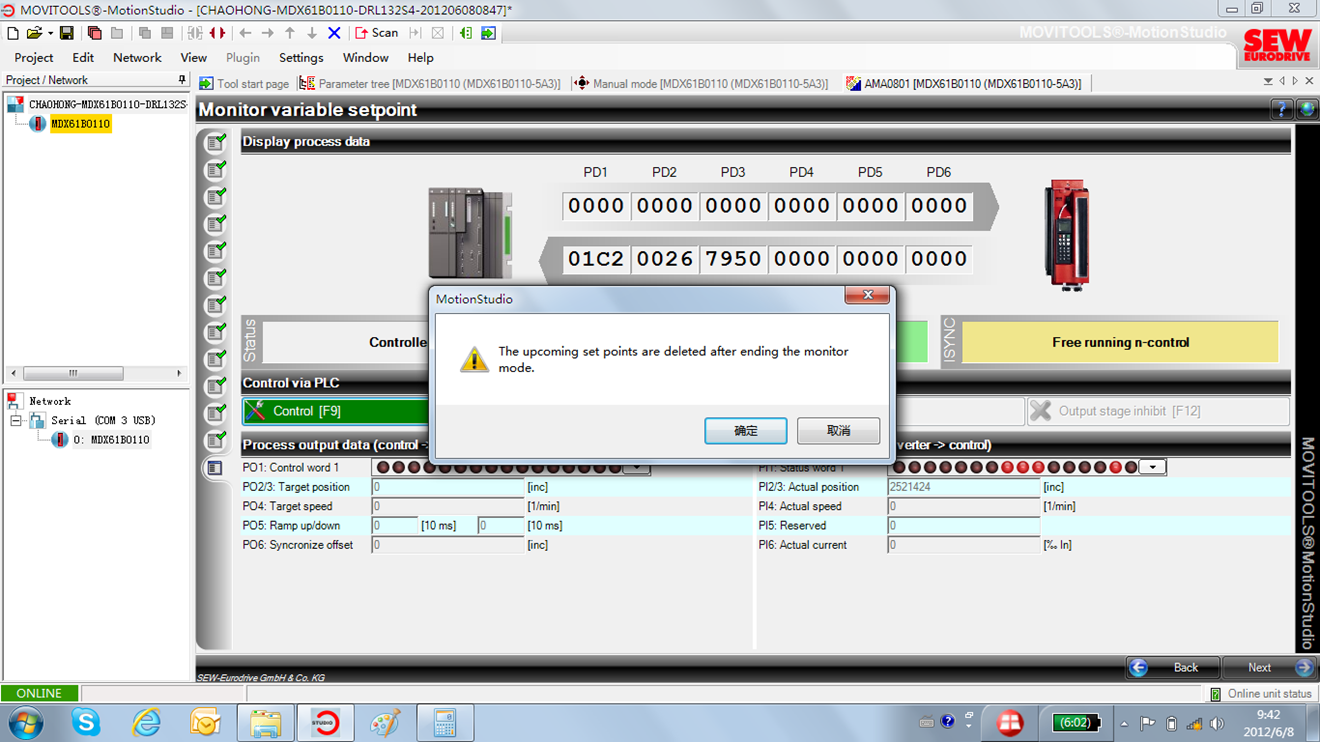
42、模拟控制设备完成后,需要退出控制模式,否则上位机的命令无效。退出时需要首先去除控制器X13/DIΦΦ“控制器禁止”端子的二进制输入;
43、注意,退出到监视模式,激活控制器X13/DIΦΦ“控制器禁止”端子的二进制输入后,上位机的命令就会生效;
44、注意,退出到监视模式,激活控制器X13/DIΦΦ“控制器禁止”端子的二进制输入后,上位机的命令就会生效。此时可编写上位机程序,通过程序来控制设备运行;
45、选择“Export”,将配置的参数导出到文件,之后可将其导入到相似的控制系统中;
46、可选择“project > save(as)”,保存项目;
47、可选择“project > export”,导出项目到压缩文件;
48、若后期设备应用有更改,需初始化控制器,可在“parameter tree”P802中选择“delivery state”,将控制器还原为出厂状态。