
SEW-MDX61B-同步伺服调试方法
一、使用 MOTION STUDIO 软件配置电机
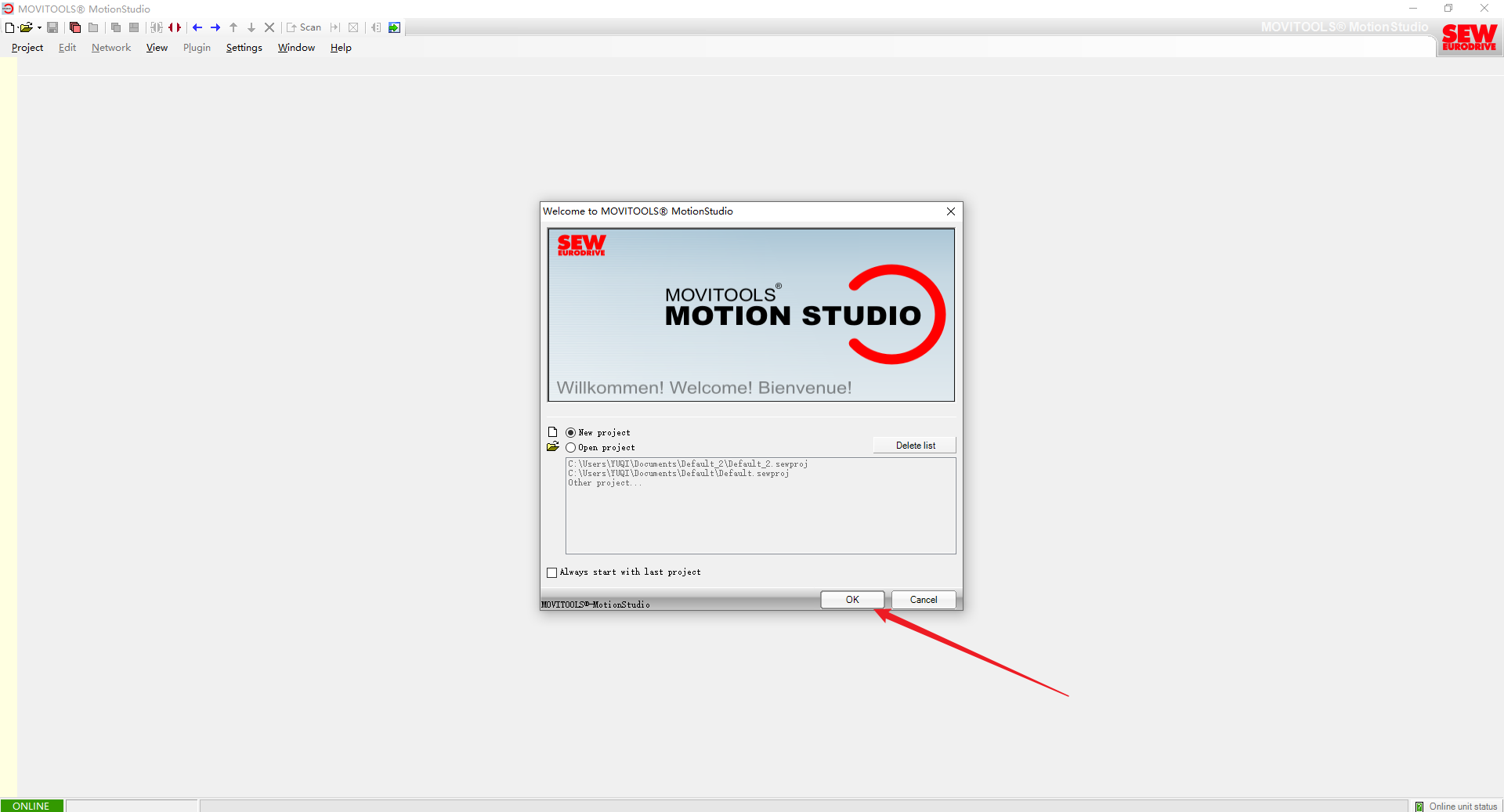
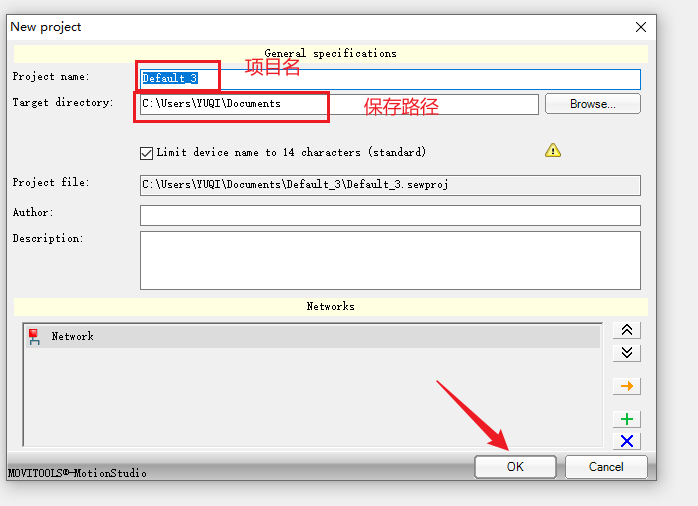
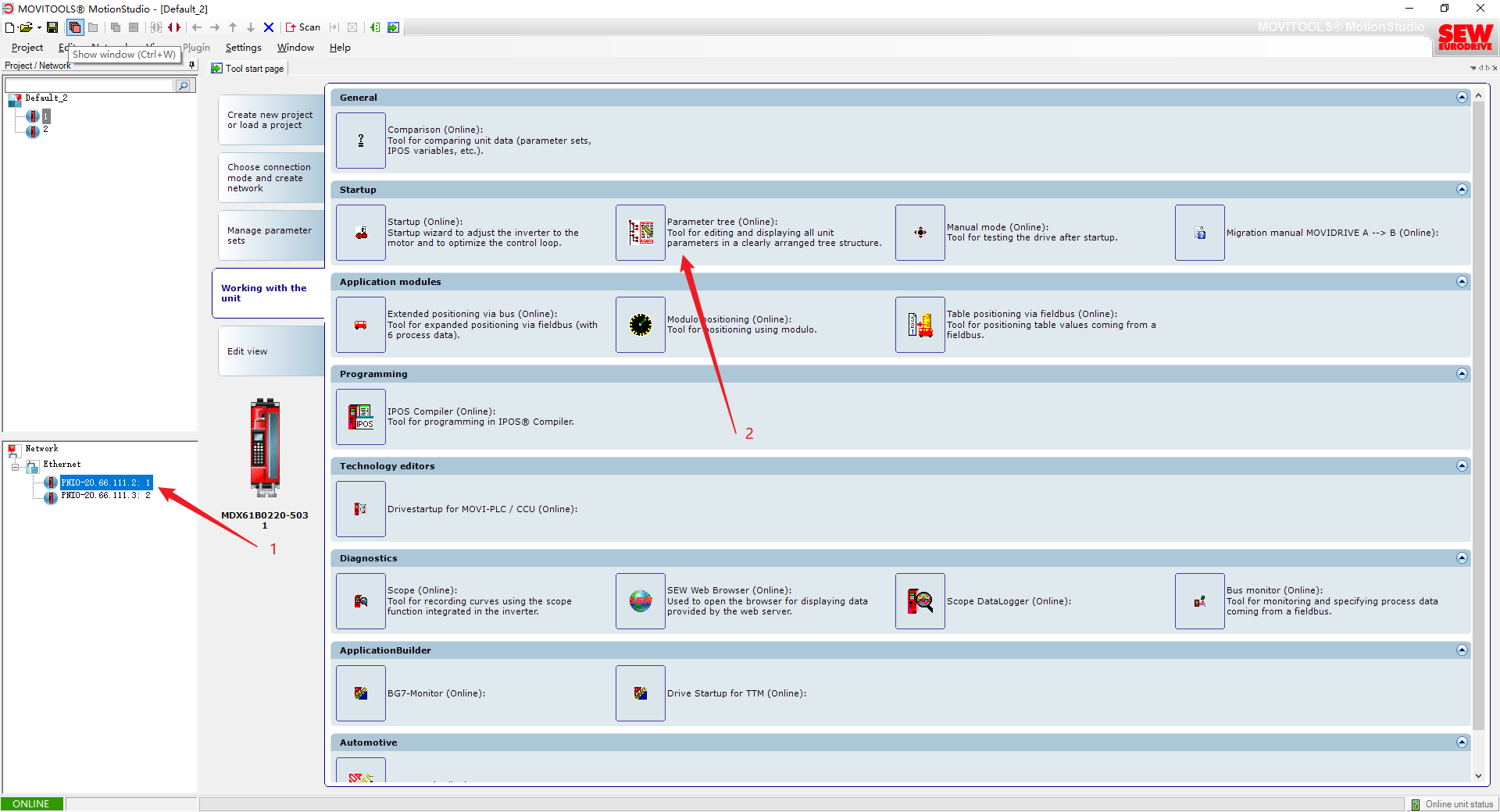
1、打开MOVITOOLS MotionStudio软件,创建项目
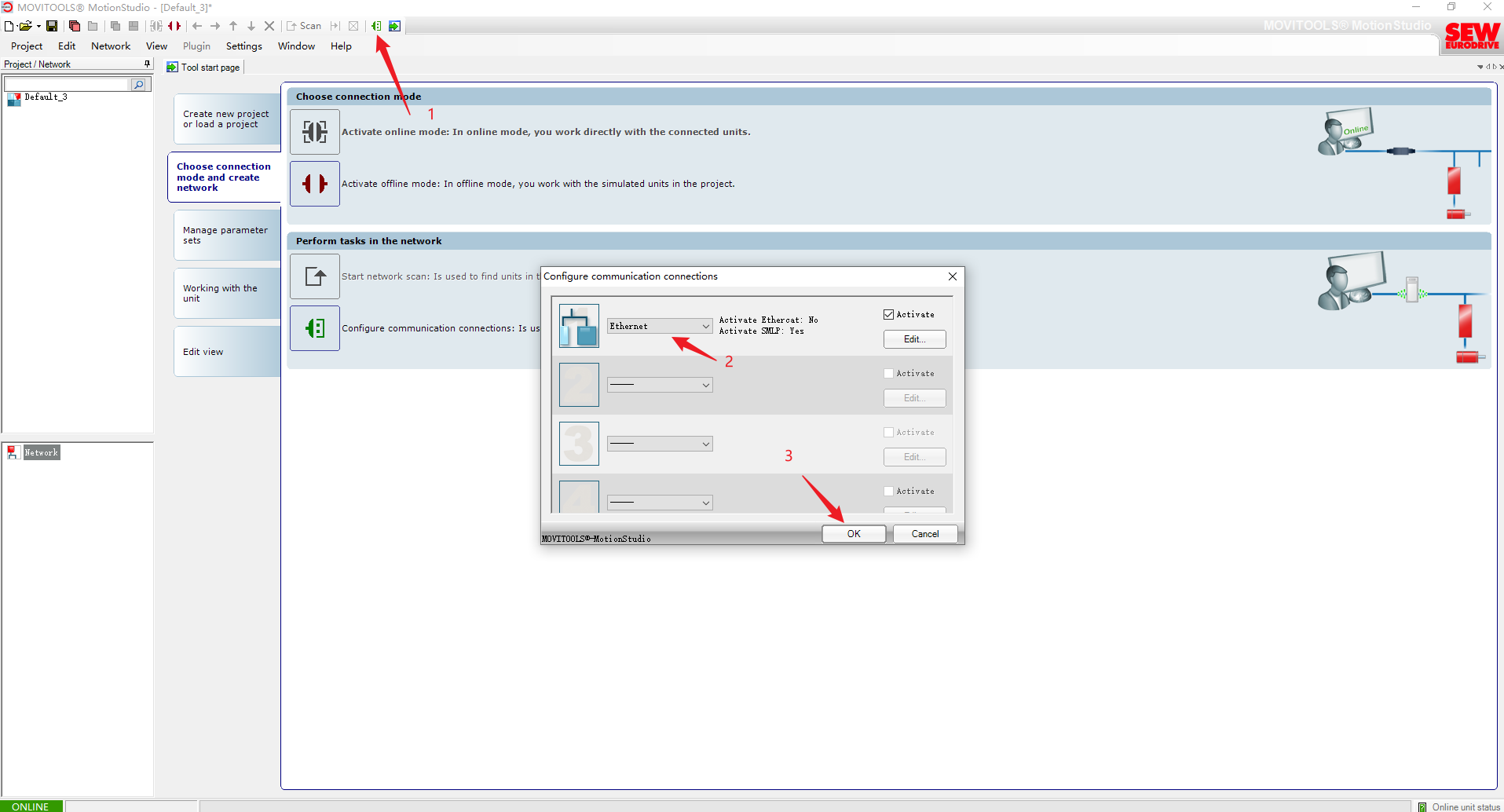
2、选择连接方式
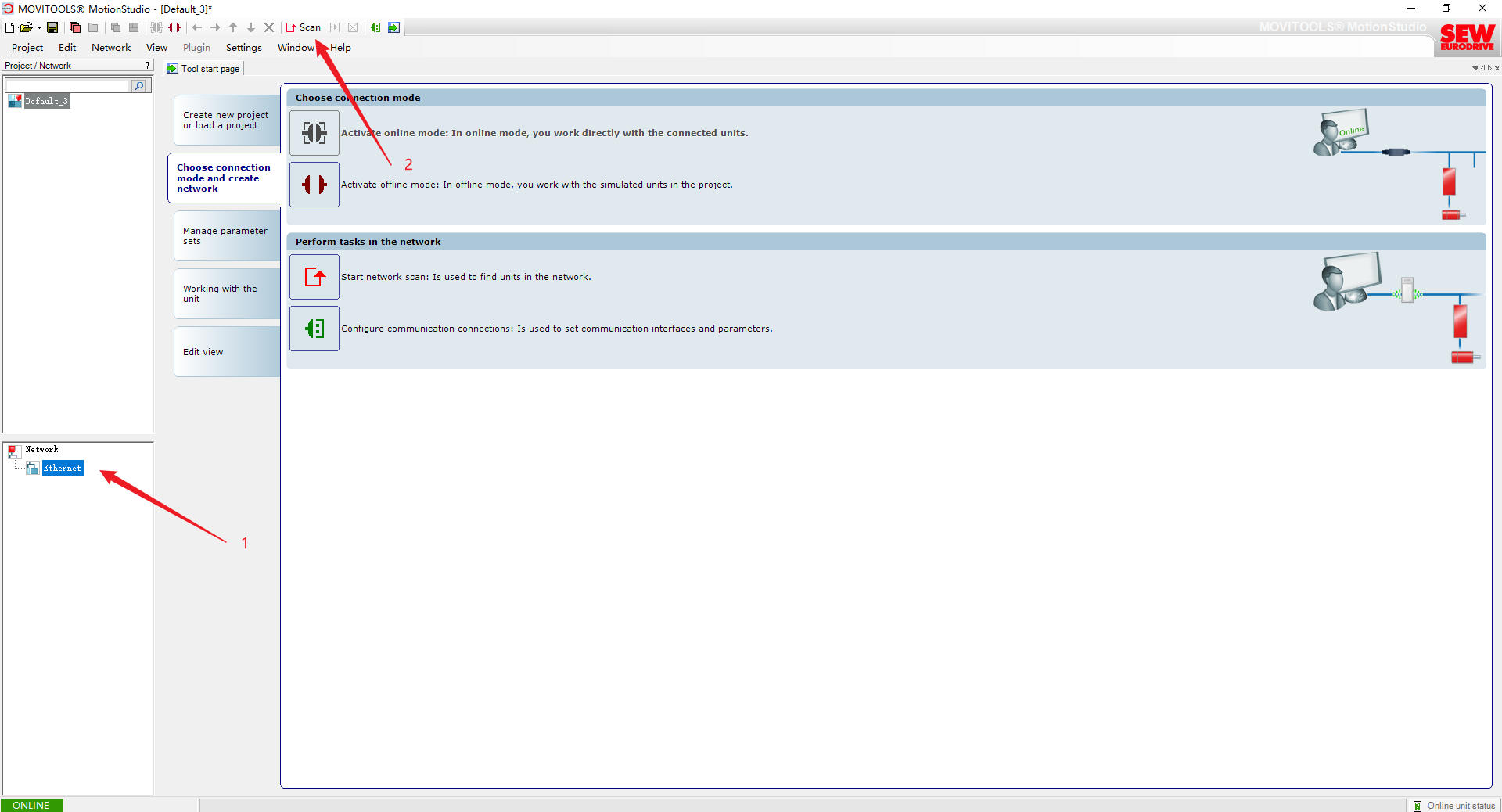
3、用网线连接电脑和MDX61B控制器网络接口,并设置电脑IP与MDX61B控制器IP处于同一网段,扫描网络上的设备
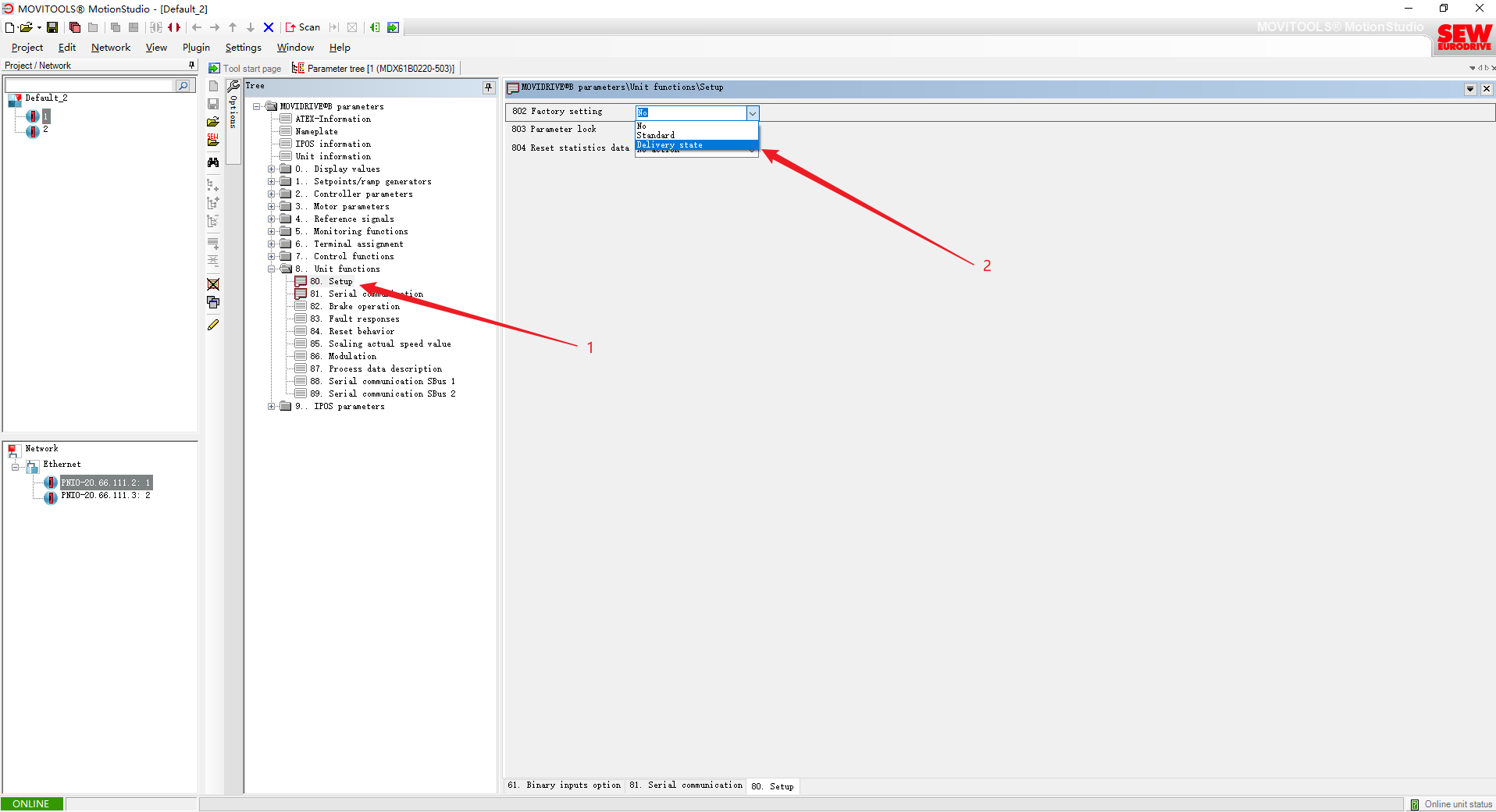
4、需初始化控制器,可在Parameter tree的P802中选择Delivery state,将控制器还原为出厂状态
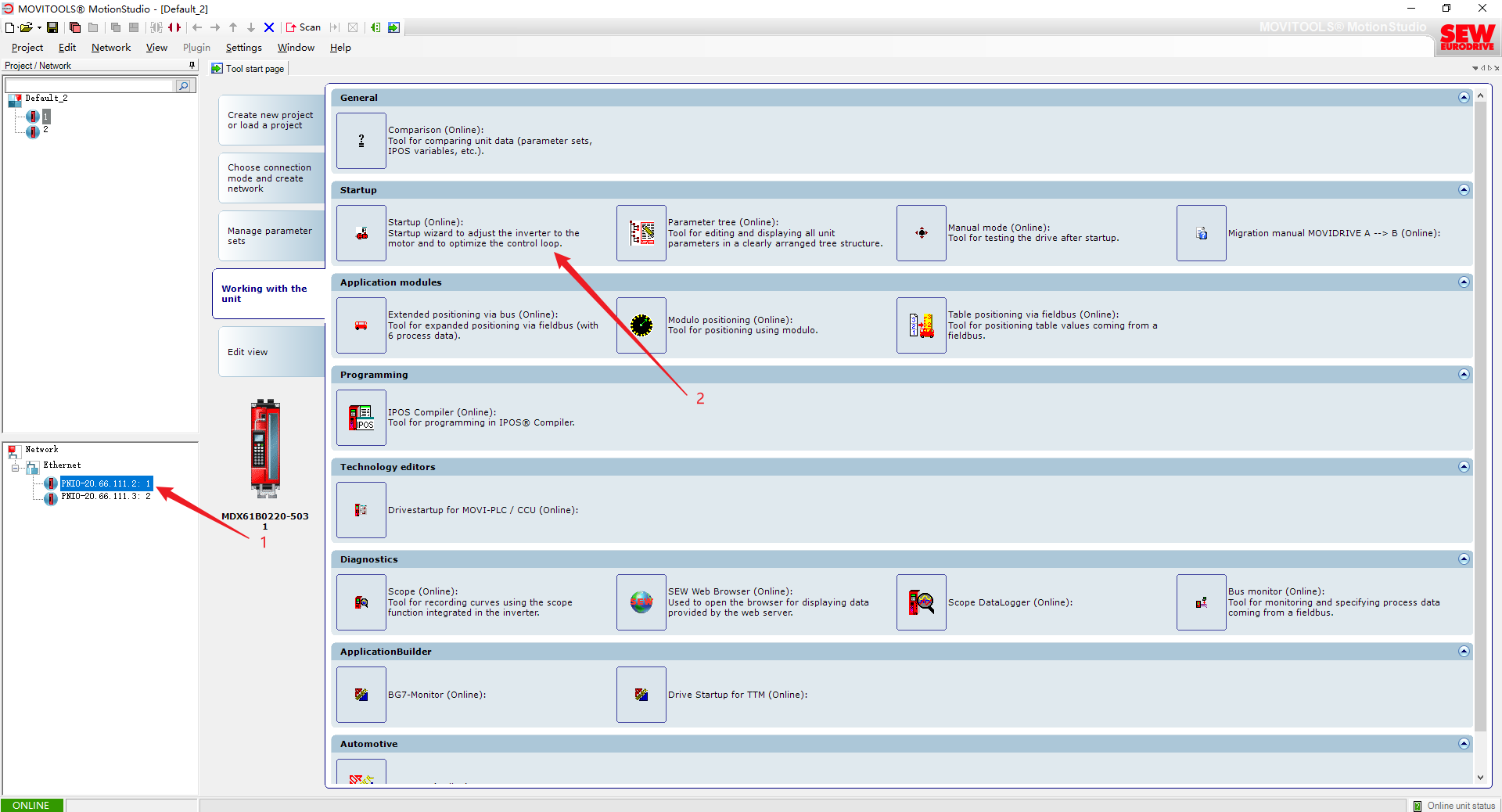
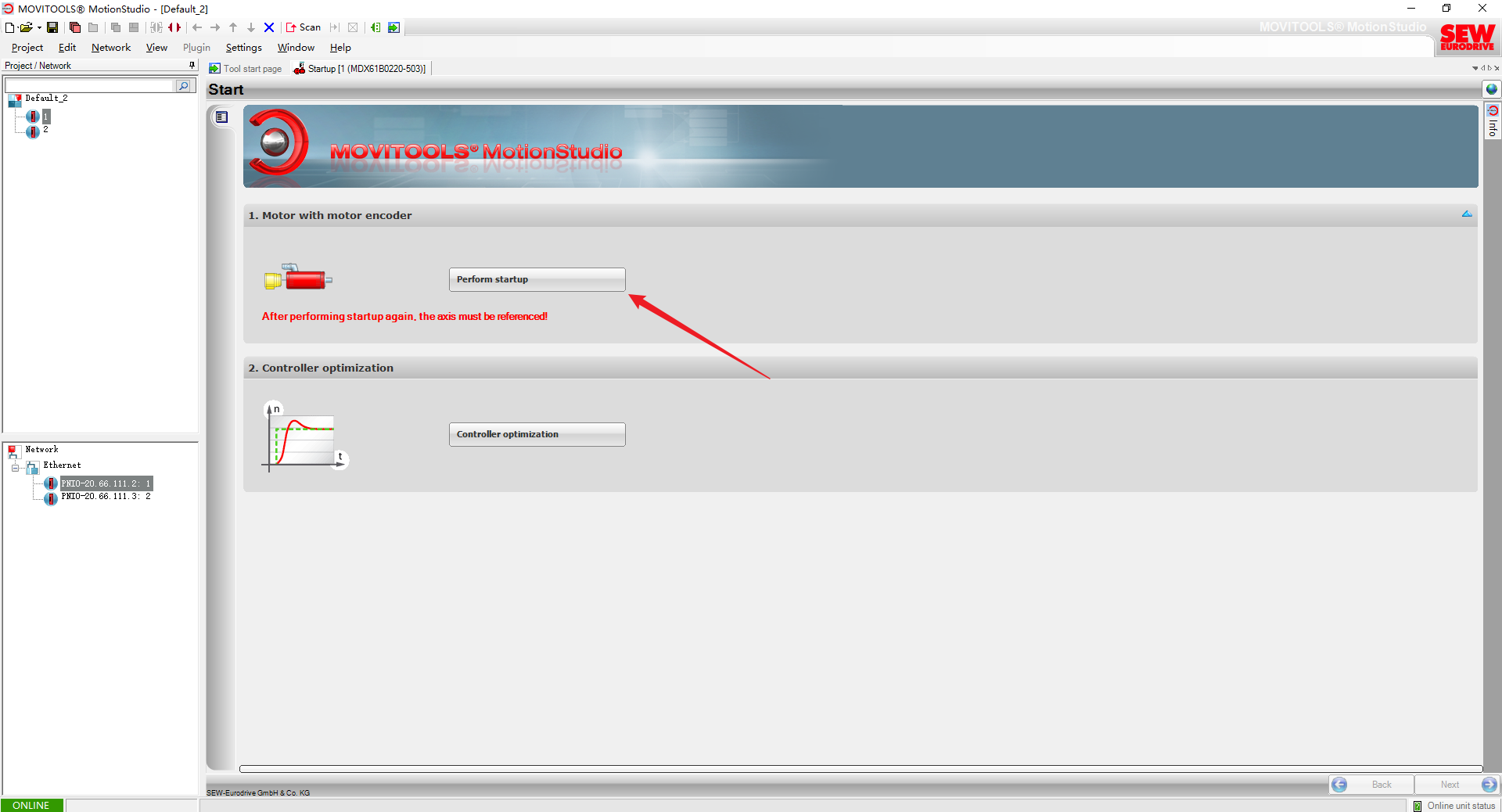
5、点击Startup中的Perform startup,开始电机初始化
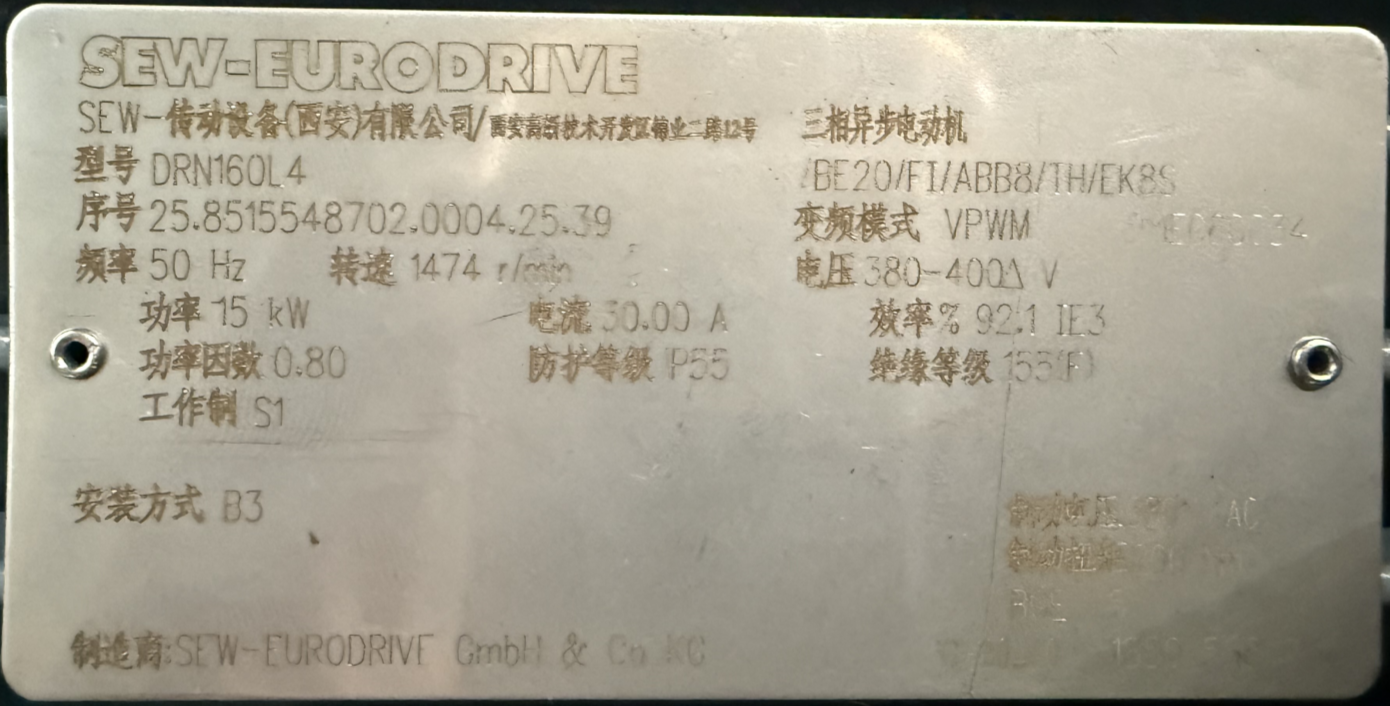
6、本次参考的电机
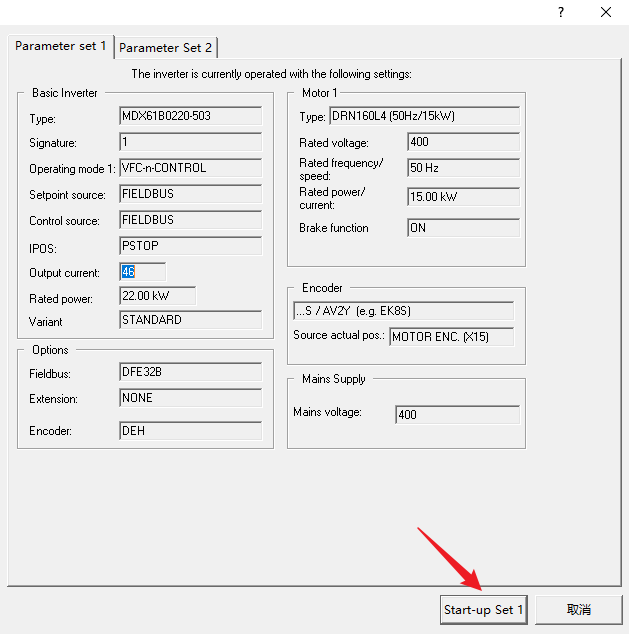
7、点击Startup set-1,进行Parameter set-1设置( 如果需要两套参数运行,Parameter set-2设置采取同样步骤)
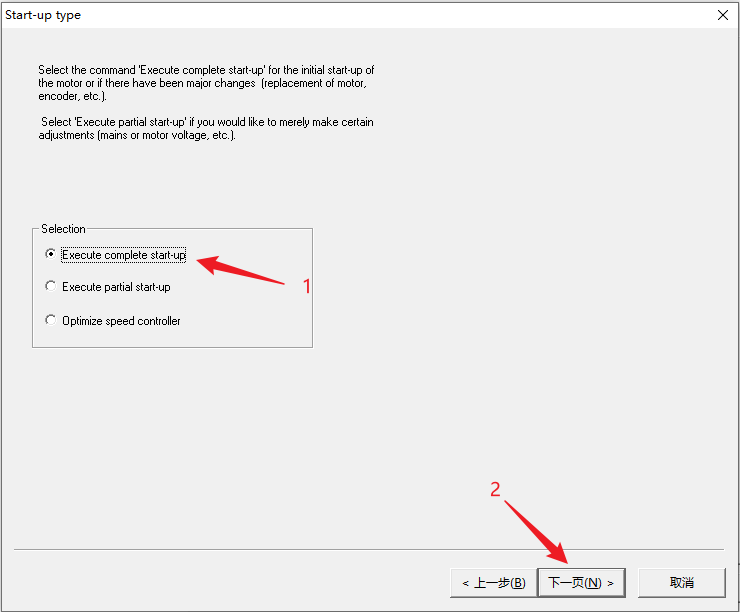
8、选择Execute complete start-up(执行完整的初始化)
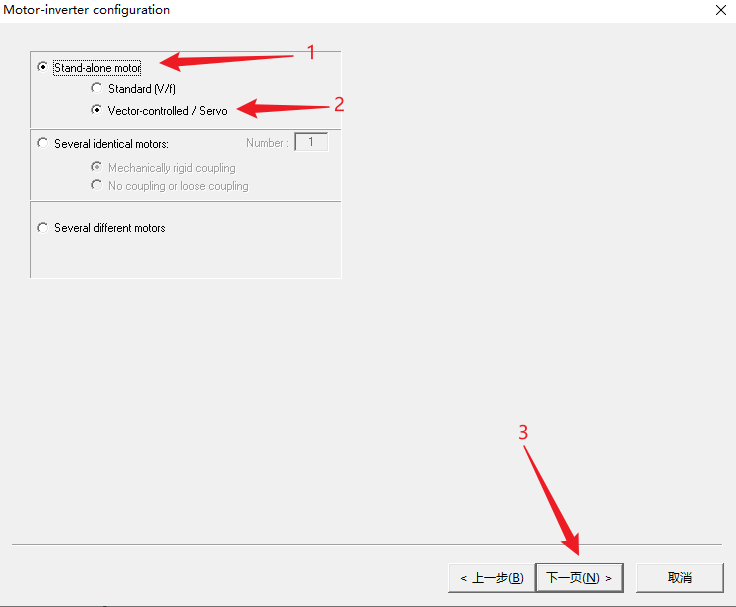
9、选择Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量控制/伺服电机)
10、所连接的编码器不包含任何电子铭牌数据
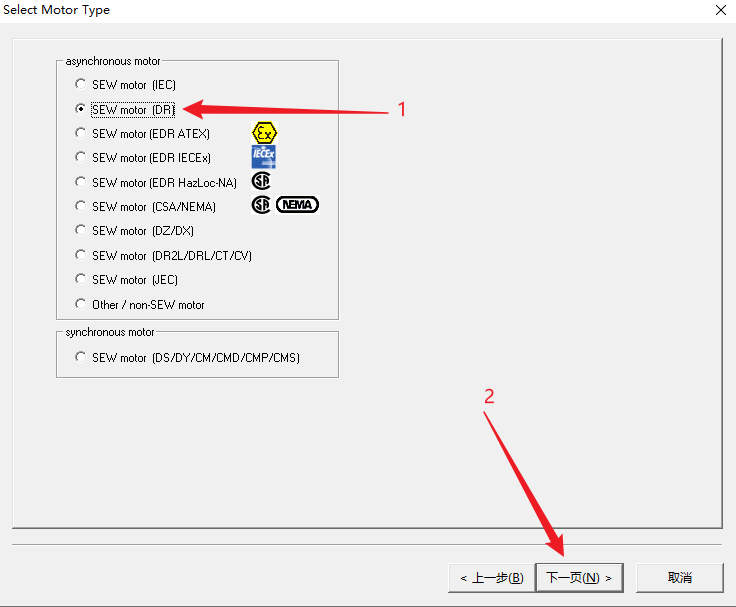
11、检查电机类型信息
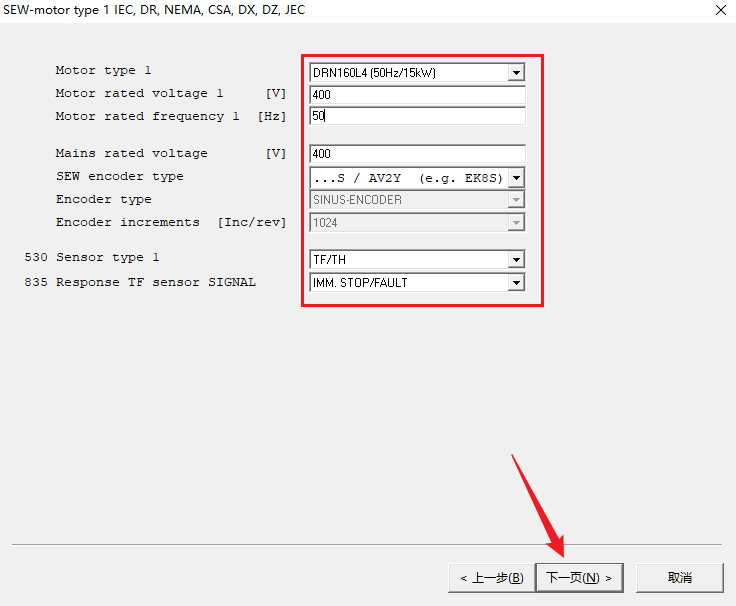
12、选择正确的电机型号,输入电机额定电压、额定频率(一般默认),输入电源电压,选择编码器类型,定义参数P530“电机温度传感器类型”(例如TF/TH),定义参数P835“电机温度传感器的响应”
13、选择Yes, I use the encoder(使用编码器)
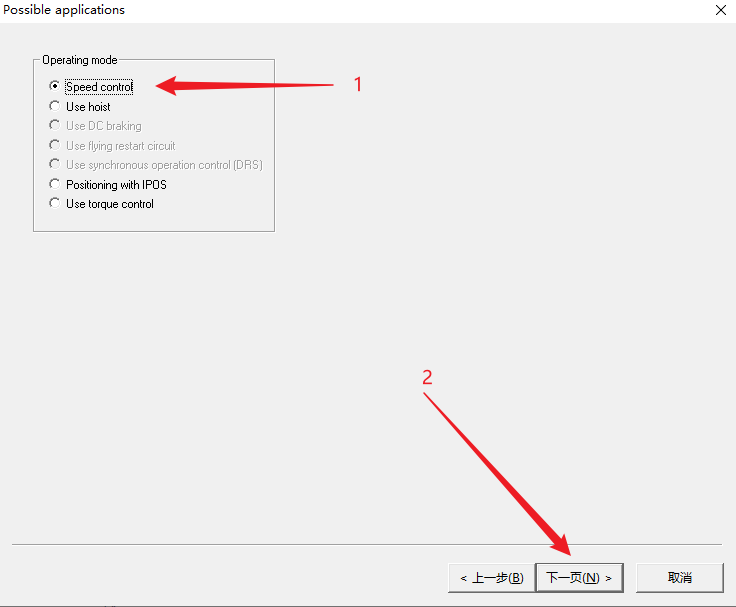
14、操作模式选择Speed conrol(速度控制模式)
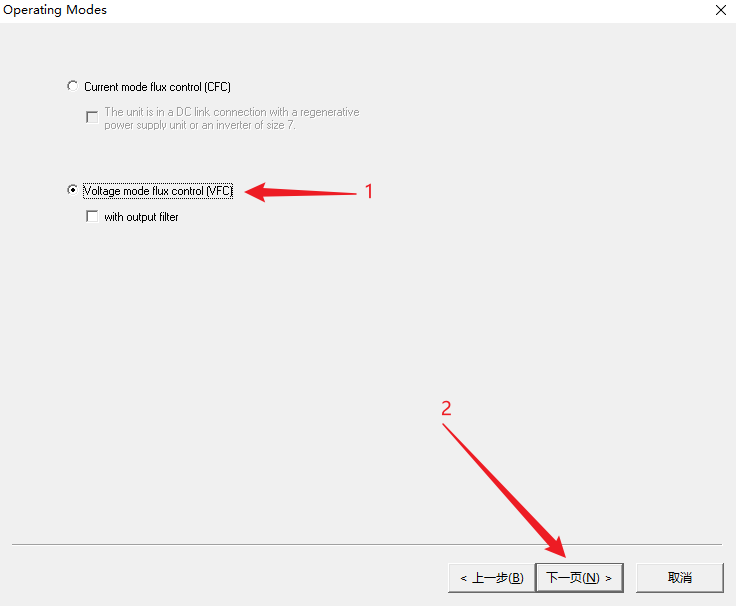
15、选择VFC(电压矢量控制)模式
!
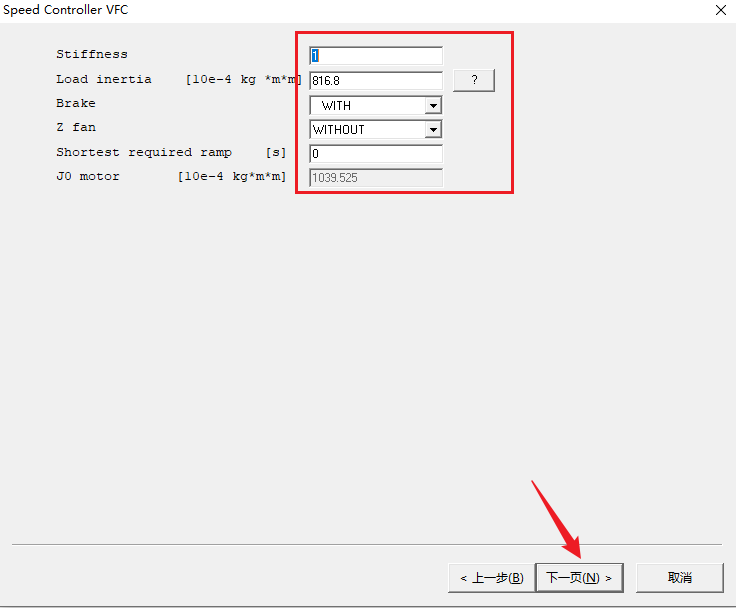
16、准确填写WEISS计算的Load inertia(负载转动惯量),Brake选择WITH,Z fan选择WITHOUT
17、相关参数使用WEISS所提供参数表中的推荐参数,其它参数选择Apply Proposal(使用推荐值)
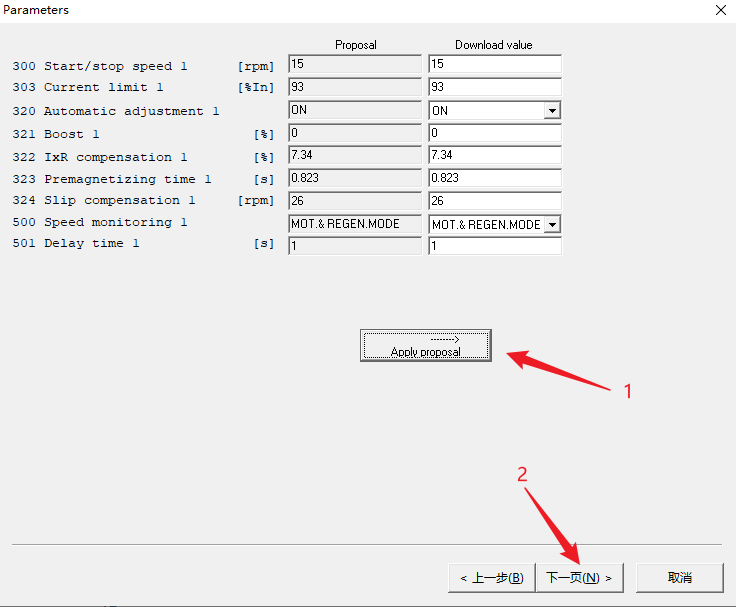
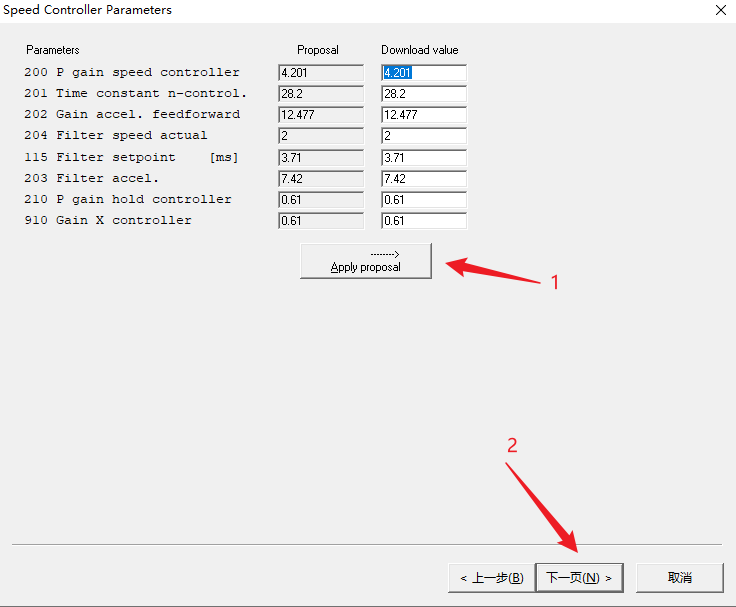
18、转速控制器参数选择Apply Proposal(使用推荐值)
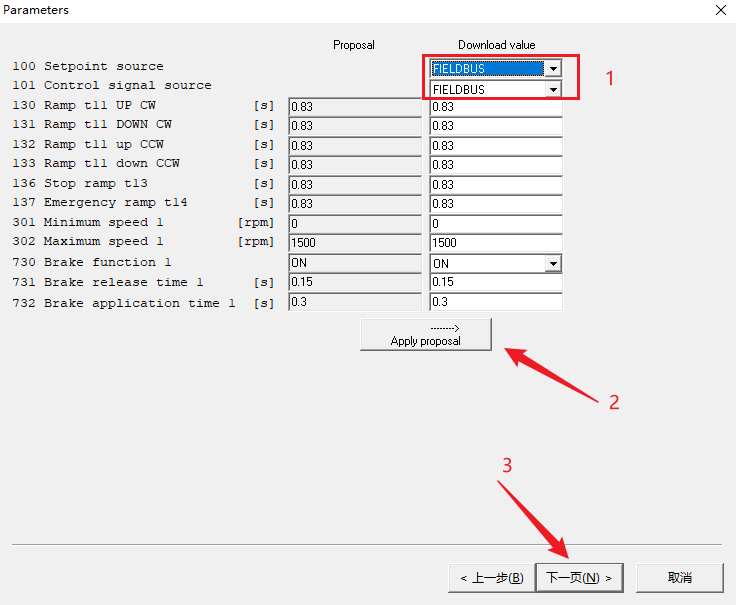
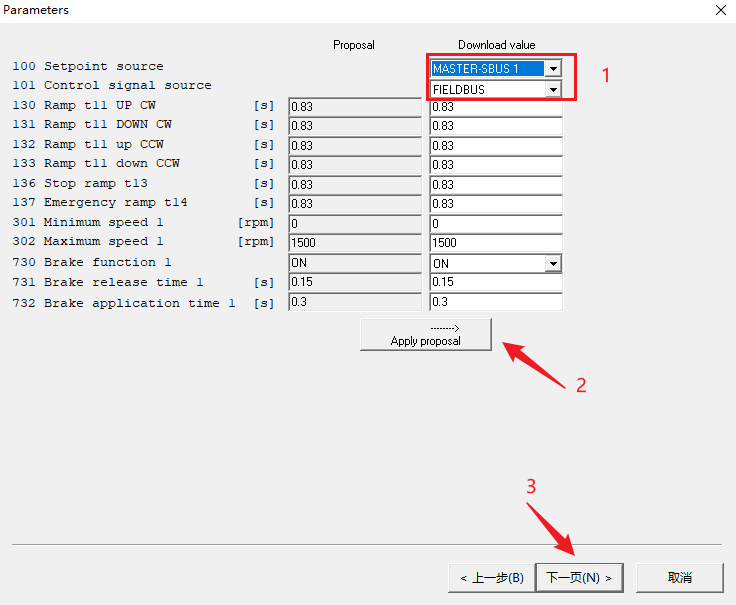
19、主电机P100设定值源和P101控制信号源选择FIELDBUS,从电机P100设定值源选择MASTER-SBUS 1、P101控制信号源选择FIELDBUS,其它相关参数使用WEISS所提供参数表中的建议参数,剩余参数选择Apply Proposal(使用推荐值)
主电机
从电机
20、点击完成,将初始化信息下载至控制器。如需配置parameter set-2,点击Download,再进行参数包2的配置
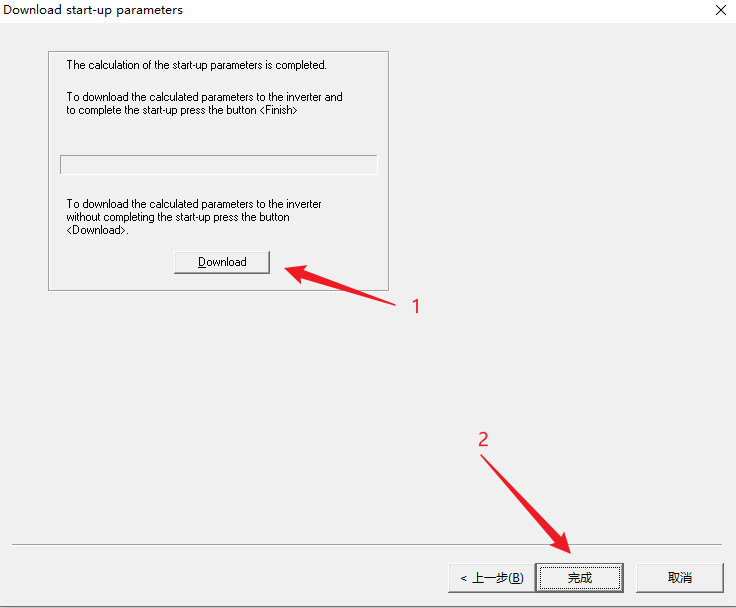
21、初始化完全完成后,会跳出提示框,点击确定
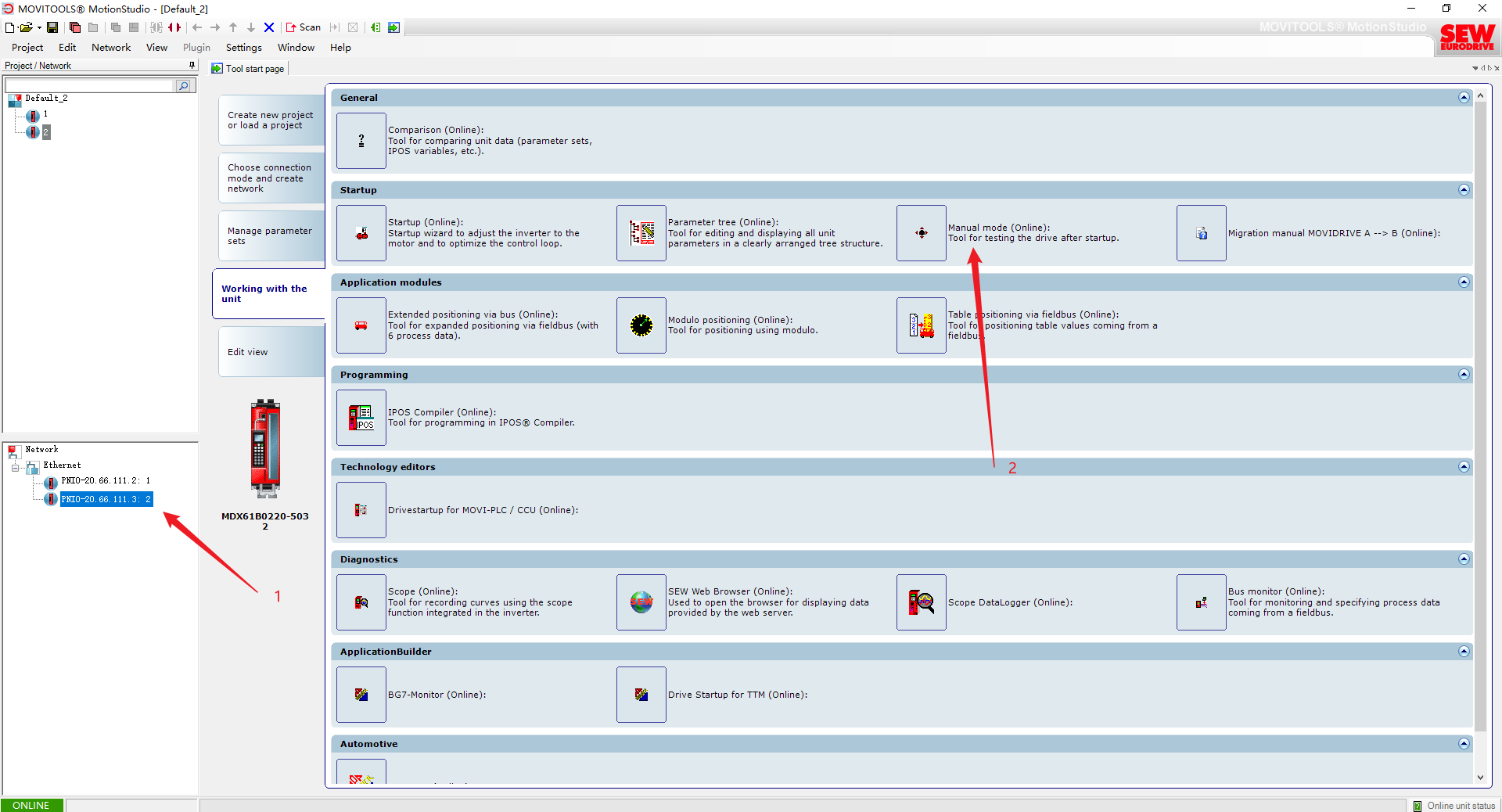
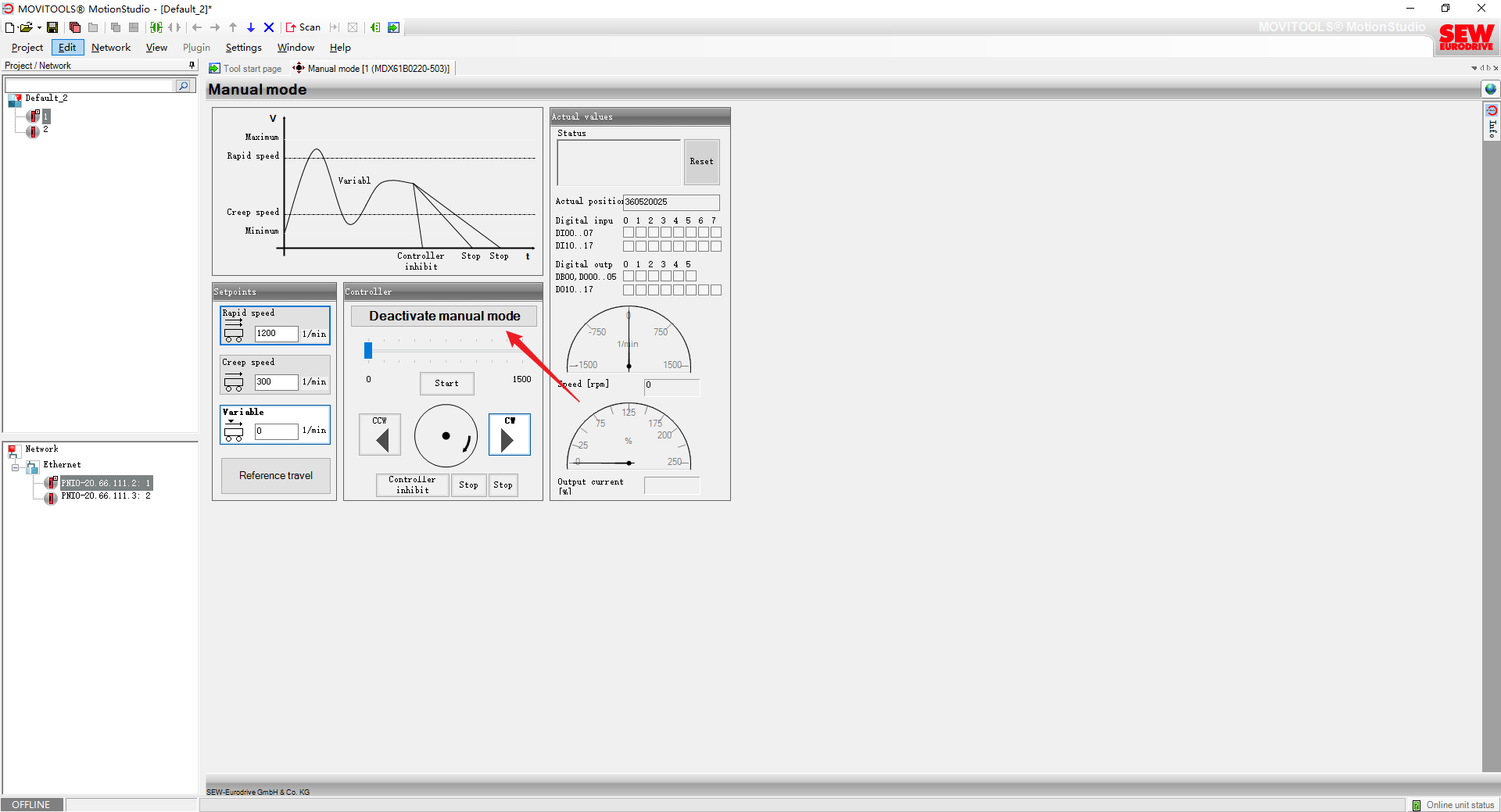
二、使用 MOTION STUDIOS 软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好
1、进入手动操作页面
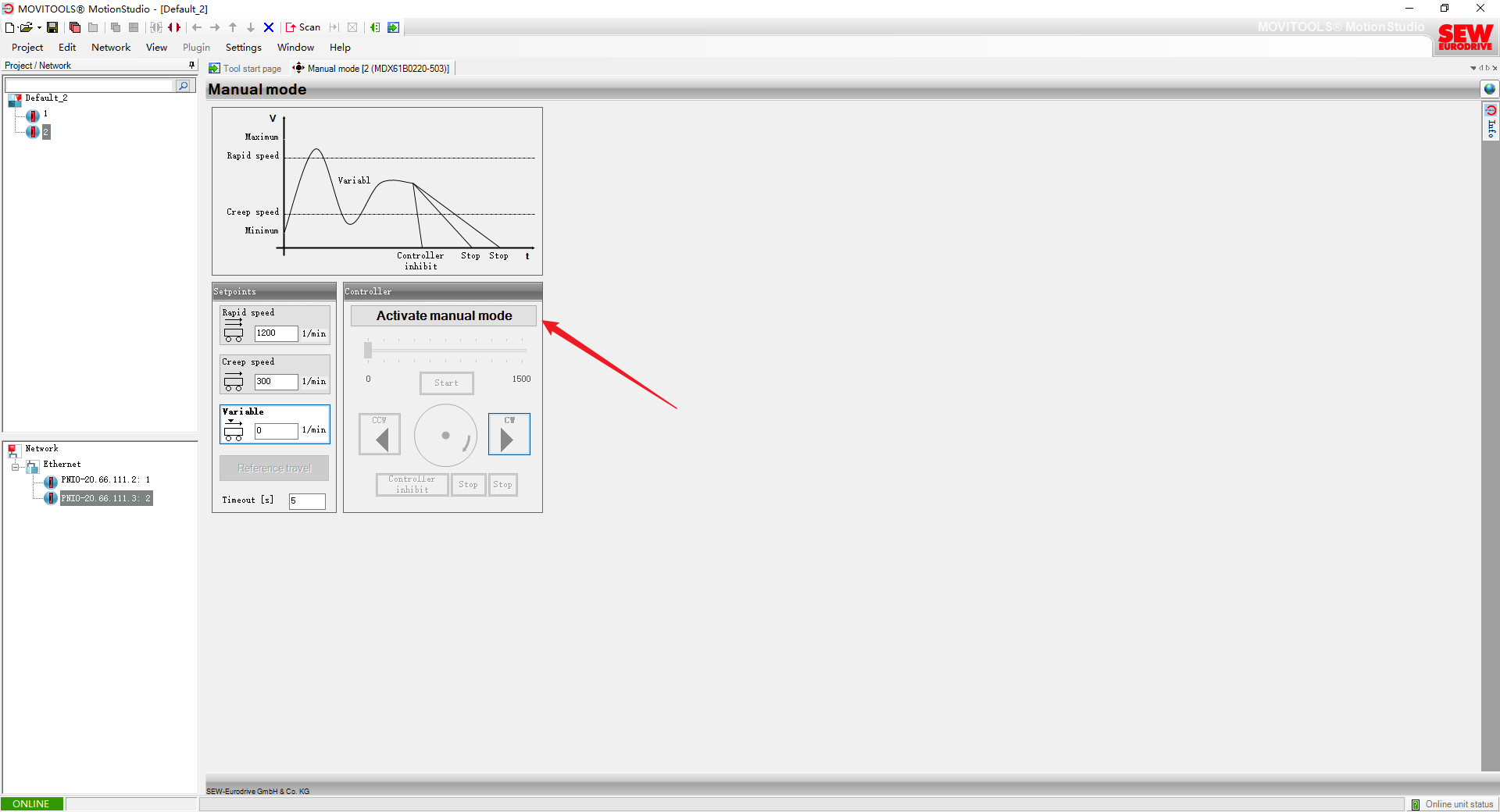
2、点击Activate manual mode,激活手动模式
3、选择控制速度,旋转方向,点击start或stop进行启停控制
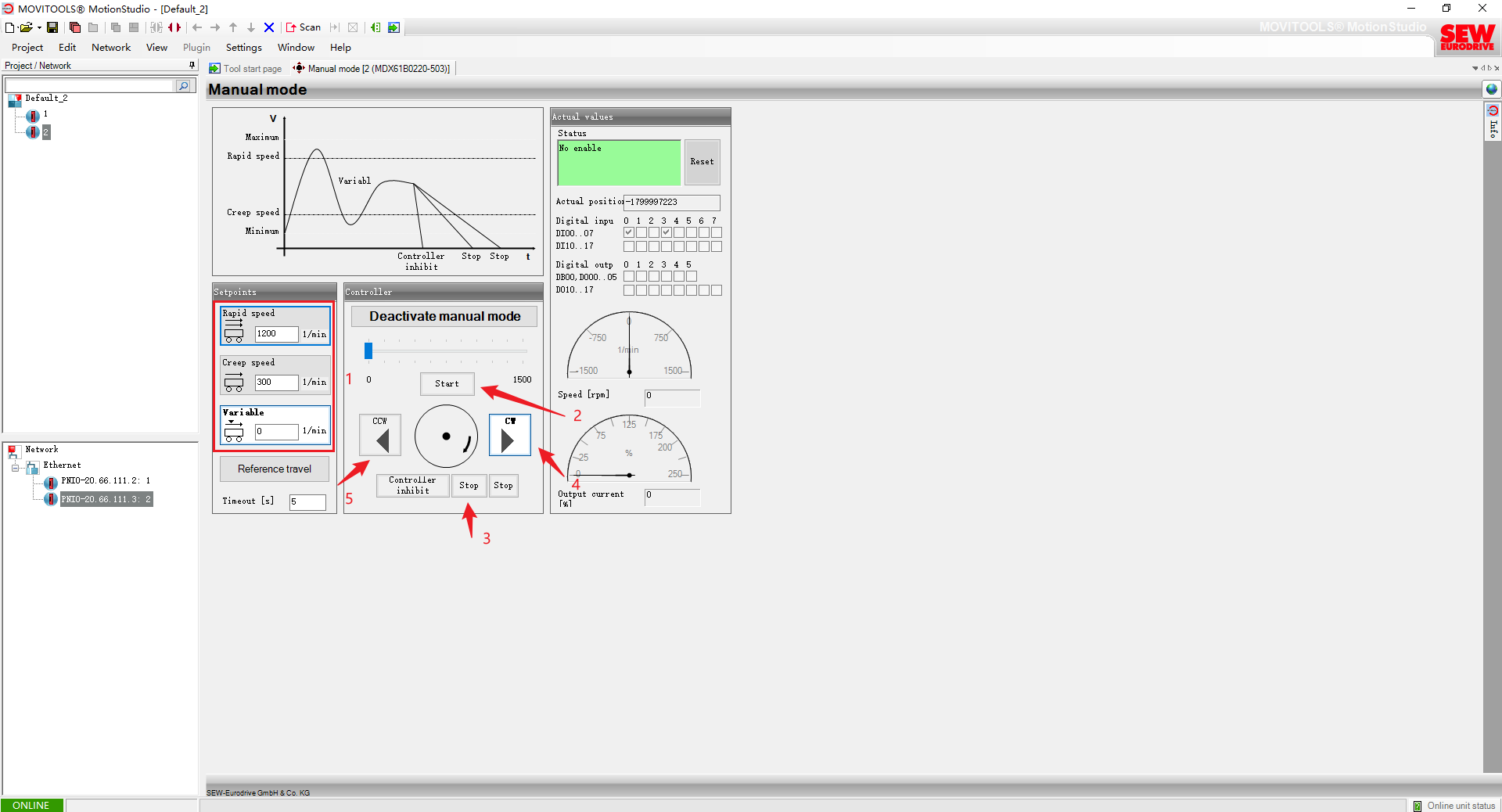
4、手动模式下,转台运行正常后,点击Deactivate manual mode,选择是,退出手动模式
三、使用 MOTION STUDIO 软件设定参数
总线位置控制-6PD-Profinet IO-双驱力矩分配升降-带增量型编码器
1、主机参数
| 100 | 设为 Fieldbus | 总线控制 |
| 101 | 设为 Fieldbus | 总线控制 |
| 130 | 设为所需值 | 速度控制时 CW 顺时针运行加速斜坡时间 |
| 131 | 设为所需值 | 速度控制时 CW 顺时针运行减速斜坡时间 |
| 132 | 设为所需值 | 速度控制时 CCW 逆时针运行加速斜坡时间 |
| 133 | 设为所需值 | 速度控制时 CCW 逆时针运行减速斜坡时间 |
| 136 | 设为所需值 | 当 ENABLE/RAP.STOP 端子由 1 变为 0 时,电机的停转时间 |
| 200 | 设为所需值 | 电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值 |
| 301 | 设为 0 | 输出最小转速 |
| 302 | 设为所需值 | 输出最大转速 |
| 303 | 设为所需值 | 输出最大电流限幅 |
| 304 | 设为所需值 | 输出最大力矩限幅 |
| 500 | 设为 MOT. & REGEN.MODE | 电机过载保护功能打开 |
| 501 | 设为所需值 | 电机过载,达到参数 303 设定值后,多长时间才停机报警 |
| 600 | 设为 Enable/stop | 输出使能 |
| 601 | 设为 Fault reset | 故障复位 |
| 602 | 设为 NO FUNCTION | 无功能 |
| 603 | 设为 NO FUNCTION | 无功能 |
| 604 | 设为/External fault | 从机故障通知 |
| 622 | 设为 Rotating field ON | 电机是否运行 |
| 623 | 设为 IPOS in position | 目标位置到位 |
| 624 | 设为/Fault | 故障报警 |
| 700 | 设为 Servo & IPOS | 伺服位置控制模式 |
| 731 | 制动器释放时间,升降驱动时:设为 0.25s | 升降控制时,起动时防溜车时间 |
| 732 | 制动器应用时间,升降驱动时:设为 0.25s | 升降控制时,停止时防溜车时间 |
| 750 | 设为 Torque SBus | 力矩控制从机模式 |
| 830 | 设为 Rapid stop/fault | 从机故障时立即停止输出,持续报警,等待复位信号 |
| 831 | 设为 Rapid stop/fault | PN 总线故障时立即停止输出,持续报警,等待复位信号 |
| 836 | 设为 Rapid stop/fault | SBUS 总线故障时立即停止输出,持续报警,等待复位信号 |
| 870 | 设为 IPOS PO data | 总线 PO1 定义,控制零点坐标系建立;发送速度值 |
| 871 | 设为 Setpoint position high | 总线 PO2 定义,发送要到达目标位置脉冲值高位 |
| 872 | 设为 Setpoint position low | 总线 PO3 定义,发送要到达目标位置脉冲值低位 |
| 873 | 设为 Status word 1 | 总线 PI1 定义,反馈驱动器状态;到位信息 |
| 874 | 设为 Actual position high | 总线 PI2 定义,反馈当前位置脉冲值高位 |
| 875 | 设为 Actual position low | 总线 PI3 定义,反馈当前位置脉冲值低位 |
| 876 | 设为 Yes | 允许总线数据传输 |
| 881 | 设为 1 | 主机 SBUS 总线地址 |
| 882 | 设为 1 | 主从机 SBUS 总线组地址 |
| 883 | 设为 0.1 | 主从机 SBUS 总线通讯监控时间 |
| 910 | 设为所需值 | 位置控制运行时,电机的位置环增益,建议 0.1-0.4 |
| 911 | 设为所需值 | 位置控制运行时电机的加速时间 |
| 912 | 设为所需值 | 位置控制运行时电机的减速时间 |
| 922 | 设为所需值 | 目标位置到位窗口,默认值 50 |
| 923 | 设为所需值 | 位置运行曲线跟踪窗口,默认值 5000 |
2、从机参数
| 100 | 设为 Master SBus 1 | SBUS 总线控制 |
| 101 | 设为 Terminals | 端子控制 |
| 130 | 设为所需值 | 速度控制时 CW 顺时针运行加速斜坡时间 |
| 131 | 设为所需值 | 速度控制时 CW 顺时针运行减速斜坡时间 |
| 132 | 设为所需值 | 速度控制时 CCW 逆时针运行加速斜坡时间 |
| 133 | 设为所需值 | 速度控制时 CCW 逆时针运行减速斜坡时间 |
| 136 | 设为所需值 | 当 ENABLE/RAP.STOP 端子由 1 变为 0 时,电机的停转时间 |
| 200 | 设为所需值 | 电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值 |
| 301 | 设为 0 | 输出最小转速 |
| 302 | 设为所需值 | 输出最大转速 |
| 303 | 设为所需值 | 输出最大电流限幅 |
| 304 | 设为所需值 | 输出最大力矩限幅 |
| 500 | 设为 MOT. & REGEN.MODE | 电机过载保护功能打开 |
| 501 | 设为所需值 | 电机过载,达到参数 303 设定值后,多长时间才停机报警 |
| 600 | 设为 No function | 无功能 |
| 601 | 设为 Fault reset | 故障复位 |
| 602 | 设为 NO FUNCTION | 无功能 |
| 603 | 设为 NO FUNCTION | 无功能 |
| 604 | 设为 NO FUNCTION | 无功能 |
| 621 | 设为/Fault | 故障报警 |
| 622 | 设为 Rotating field ON | 电机是否运行 |
| 623 | 设为 No function | 无功能 |
| 624 | 设为/Fault | 故障报警 |
| 700 | 设为 Servo & torque control | 伺服力矩控制模式 |
| 731 | 制动器释放时间,升降驱动时:设为 0.25s | 升降控制时,起动时防溜车时间 |
| 732 | 制动器应用时间,升降驱动时:设为 0.25s | 升降控制时,停止时防溜车时间 |
| 750 | 设为 Master/slave off | 主机功能关闭 |
| 830 | 设为 Rapid stop/fault | 从机故障时立即停止输出,持续报警,等待复位信号 |
| 831 | 设为 Rapid stop/fault | PN 总线故障时立即停止输出,持续报警,等待复位信号 |
| 836 | 设为 Rapid stop/fault | SBUS 总线故障时立即停止输出,持续报警,等待复位信号 |
| 870 | 设为 Control word 1 | 总线 PO1 定义,控制电机启动,停止 |
| 871 | 设为 Setpoint current | 总线 PO2 定义,发送从机需要输出的力矩值 |
| 872 | 设为 IPOS PO data | 总线 PO3 定义,保留未使用 |
| 873 | 设为 Status word 1 | 总线 PI1 定义,反馈驱动器状态 |
| 874 | 设为 Actual speed | 总线 PI2 定义,反馈当前电机运行的速度 |
| 875 | 设为 IPOS PI data | 总线 PI3 定义,保留未使用 |
| 876 | 设为 Yes | 允许总线数据传输 |
| 881 | 设为 2 | 主机 SBUS 总线地址 |
| 882 | 设为 1 | 主从机 SBUS 总线组地址 |
| 883 | 设为 0.1 | 主从机 SBUS 总线通讯监控时间 |
总线速度控制-6PD-Profinet IO-双驱板链-带增量型编码器
1、主机参数
| 100 | 设为 Fieldbus | 总线控制 |
| 101 | 设为 Fieldbus | 总线控制 |
| 130 | 设为所需值 | 速度控制时 CW 顺时针运行加速斜坡时间 |
| 131 | 设为所需值 | 速度控制时 CW 顺时针运行减速斜坡时间 |
| 132 | 设为所需值 | 速度控制时 CCW 逆时针运行加速斜坡时间 |
| 133 | 设为所需值 | 速度控制时 CCW 逆时针运行减速斜坡时间 |
| 136 | 设为所需值 | 当 ENABLE/RAP.STOP 端子由 1 变为 0 时,电机的停转时间 |
| 200 | 设为所需值 | 电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值 |
| 301 | 设为 0 | 输出最小转速 |
| 302 | 设为所需值 | 输出最大转速 |
| 303 | 设为所需值 | 输出最大电流限幅 |
| 304 | 设为所需值 | 输出最大力矩限幅 |
| 500 | 设为 MOTOR/REGENERATIVE | 电机过载保护功能打开 |
| 501 | 设为所需值 | 电机过载,达到参数 303 设定值后,多长时间才停机报警 |
| 602 | 设为 Enable/stop | 输出使能 |
| 700 | 设为 CFC | 电压矢量控制 |
| 731 | 制动器释放时间,升降驱动时:设为 0.15s | 起动时防溜车时间 |
| 732 | 制动器应用时间,升降驱动时:设为 0.3s | 停止时防溜车时间 |
| 750 | 设为 Speed SBus | 速度控制从机模式 |
| 870 | 设为 Control word 1 | 总线 PO1 定义,启动/停止用的控制信号 |
| 871 | 设为 Setpoint speed | 总线 PO2 定义,转速设定值 |
| 872 | 设为 Ramp | 总线 PO3 定义,斜坡时间 |
| 873 | 设为 Status word 1 | 总线 PI1 定义,变频器的状态信息 |
| 874 | 设为 Actual speed | 总线 PI2 定义,当前实际转速 |
| 875 | 设为 Output curent | 总线 PI3 定义,输出电流 |
| 876 | 设为 Yes | 允许总线数据传输 |
| 881 | 设为 2 | 主机 SBUS 总线地址 |
| 882 | 设为 1 | 主从机 SBUS 总线组地址 |
| 883 | 设为 0.0 | 主从机 SBUS 总线通讯监控时间 |
2、从机参数
| 100 | 设为 Master SBus 1 | SBUS 总线控制 |
| 101 | 设为 Fieldbus | 总线控制 |
| 130 | 设为所需值 | 速度控制时 CW 顺时针运行加速斜坡时间 |
| 131 | 设为所需值 | 速度控制时 CW 顺时针运行减速斜坡时间 |
| 132 | 设为所需值 | 速度控制时 CCW 逆时针运行加速斜坡时间 |
| 133 | 设为所需值 | 速度控制时 CCW 逆时针运行减速斜坡时间 |
| 136 | 设为所需值 | 当 ENABLE/RAP.STOP 端子由 1 变为 0 时,电机的停转时间 |
| 200 | 设为所需值 | 电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值 |
| 301 | 设为 0 | 输出最小转速 |
| 302 | 设为所需值 | 输出最大转速 |
| 303 | 设为所需值 | 输出最大电流限幅 |
| 304 | 设为所需值 | 输出最大力矩限幅 |
| 500 | 设为 MOTOR/REGENERATIVE | 电机过载保护功能打开 |
| 501 | 设为所需值 | 电机过载,达到参数 303 设定值后,多长时间才停机报警 |
| 602 | 设为 Enable/stop | 输出使能 |
| 700 | 设为 CFC | 电压矢量控制 |
| 731 | 制动器释放时间,升降驱动时:设为 0.15s | 起动时防溜车时间 |
| 732 | 制动器应用时间,升降驱动时:设为 0.3s | 停止时防溜车时间 |
| 750 | 设为 Master/slave off | 主机功能关闭 |
| 870 | 设为 Control word 1 | 总线 PO1 定义,启动/停止用的控制信号 |
| 871 | 设为 Setpoint speed | 总线 PO2 定义,转速设定值 |
| 872 | 设为 Ramp | 总线 PO3 定义,斜坡时间 |
| 873 | 设为 Status word 1 | 总线 PI1 定义,变频器的状态信息 |
| 874 | 设为 Actual speed | 总线 PI2 定义,当前实际转速 |
| 875 | 设为 Output curent | 总线 PI3 定义,输出电流 |
| 876 | 设为 Yes | 允许总线数据传输 |
| 881 | 设为 1 | 主机 SBUS 总线地址 |
| 882 | 设为 1 | 主从机 SBUS 总线组地址 |
| 883 | 设为 0.0 | 主从机 SBUS 总线通讯监控时间 |
四、接线
主机与从机的X12端口需对接
| 主机端子 | 从机端子 |
|---|---|
| DGND | DGBD |
| SC11 | SC11 |
| SC12 | SC12 |
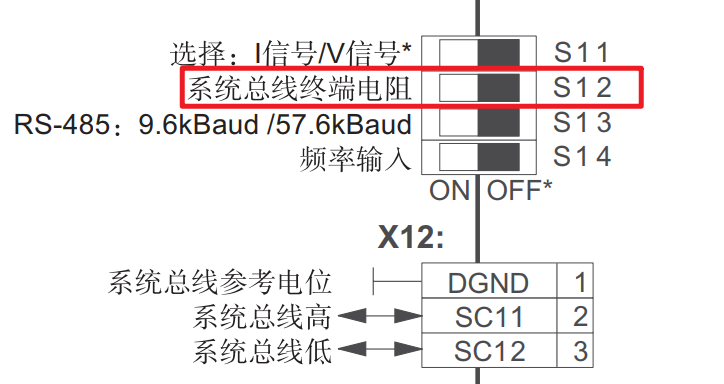
五、拨码
从机 S12 需置于 ON 处
六、总线使用说明
总线位置控制-6PD-Profinet IO-双驱力矩分配升降-带增量型编码器
PLC 设定至变频器值
PO1 : IPOS PO-DATA
第一个 PO 字发 1 至驱动器,表示将当前位置的坐标清零,建立机械坐标系;发其它数值至驱动器,表示设定所需的速度,比例为 0.1,如需按 500rpm 运行,发 5000 即可
如 PO1 对应 QW256,直接赋值到 QW256 即可
PO2 : Setpoint position high ;PO3 : Setpoint position low
所需电机要到达的位置可通过总线第二和第三个 PO字双字格式进行控制
如 PO2 对应 QW258;PO3 对应 QW260;
想让电机运行到 1000000 脉冲(电机 4096 脉冲/转)的目标位置,直接赋值到 QD258 即可
PO4 : IMAX
表示设定所需输出的最大力矩,比例为 0.1,如需按 70%输出限幅,发 700 即可
如 PO4 对应 QW262,直接赋值到 QW262 即可
PO5 : Accelerating ramp
表示设定所需加速斜坡时间,比例为 1:1ms,如需按 3s斜坡加速,发 3000 即可
如 PO5 对应 QW264,直接赋值到 QW264 即可
PO6 : Deceleration ramp
表示设定所需减速斜坡时间,比例为 1:1ms,如需按 2s斜坡加速,发 2000 即可
如 PO6 对应 QW266,直接赋值到 QW266 即可
变频器反馈至 PLC 值
PI1 : Status word 1 (状态字 1)
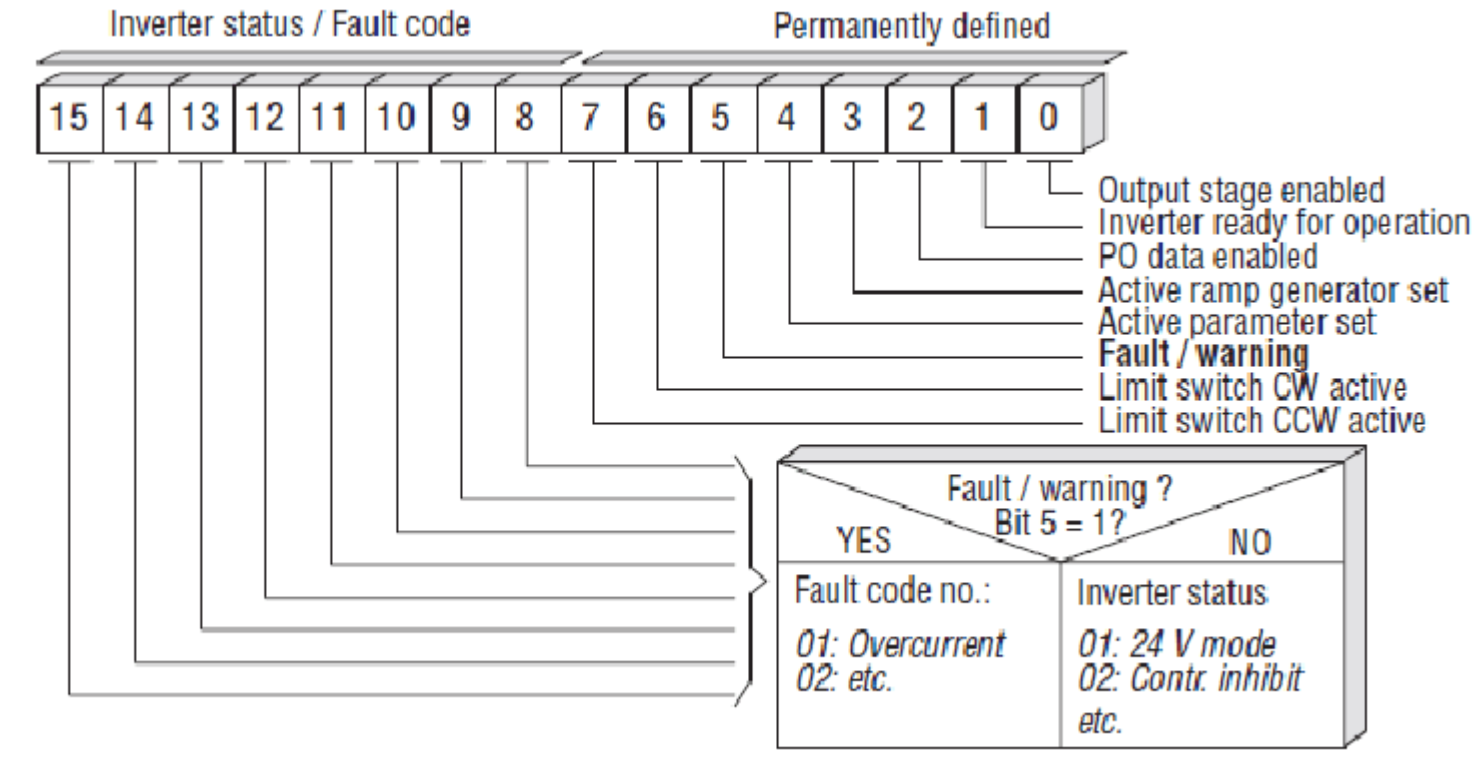
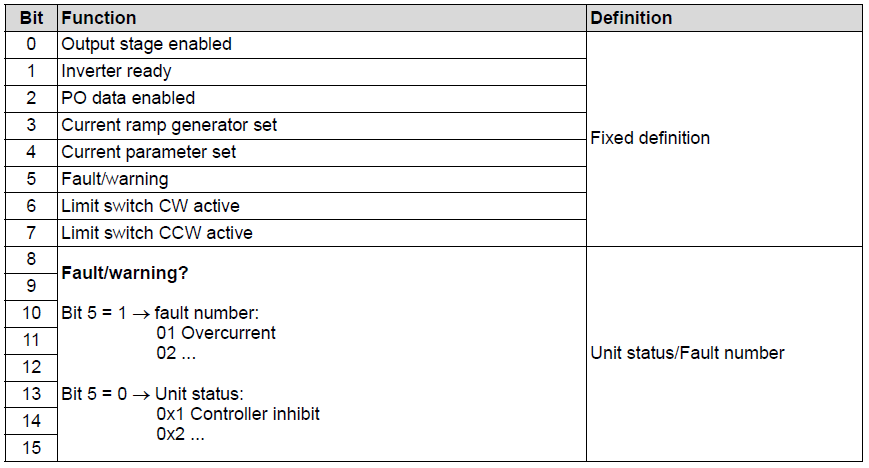
当第 5 位为 1 时,表示变频器有报警;高 8 位(8-15 位)的整型数值为报警代码(代码含义请看 SEW_MDX61B 驱动控制器系统手册英文版 Edition2010.8 第620-636 页)
当第 5 位为 0 时,表示变频器没有报警;高 8 位(8-15 位)的整型数值为变频器运行状态代码(代码含义请看 SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8 第 609 页)
如 PI1 对应 IW256
想知道系统的相应状态,直接从 IW256 读值即可
PI2 : Actual position high ;PI3 : Actual position low
伺服系统的当前位置坐标可通过总线第二和第三个 PI 字双字格式读上来
如 PI2 对应 IW258;PI3 对应 IW260;
想知道电机运行到什么位置,直接从 ID258 读值即可
PI4 : Actual speed
如 PI4 对应 IW262
想知道电机运行的速度,直接从 IW262 读值即可
比例为 0.1,如读取值为 6000,则实际值为 600rpm
PI5 : Actual current
如 PI5 对应 IW264
想知道电机实际输出的有功电流(力矩),直接从 IW264 读值即可
PI6 : OUTPUTS
如 PI6 对应 IW266
想知道驱动器的 DO 输出状态,直接从 IW266 读值即可
总线速度控制-6PD-Profinet IO-双驱板链-带增量型编码器
PLC 设定至变频器值
变频器反馈至 PLC 值
七、使用 MOTION STUDIO 软件,输入驱动器内位控程序
总线位置控制-6PD-Profinet IO-双驱力矩分配升降-带增量型编码器
总线位控模式运行时,伺服控制器内接口程序
1 | SET H200 = 3 //设定接口格式:外部总线数据传输 |
由于此程序利用总线第一个传送字既作为速度传送,也作为置坐标指令传送,因此在发送时应根据实际情况进行:
由于此程序利用总线第一个传送字既作为速度传送,也作为置坐标指令传送,因此在发送时应根据实际情况进行:
如:总线第一个传送字发送 1 到伺服系统内,伺服系统将按 0.1rpm(0.1的比例),以及第二和第三个传送字发来的目标坐标值进行定位运行;但由于也同时将当前的位置坐标置为 0,如果第二和第三个传送字发来的目标坐标值与 0不同,伺服系统将按 0.1rpm 不断朝一个方向运行;
在需要进行回零操作时,应先将系统运行到机械零点位置,然后将ENABLE/RAP.STOP 端子置为 0,等待 50ms 后在给第一个传送字发送 1,则伺服驱动器坐标系清零;
然后在给第一个传送字发 送 0,第二和第三个传送字发送 0,然后 将ENABLE/RAP.STOP 端子置为 1,伺服系统进入 0 速力矩保持状态,等待运行;
如果仅将第一个传送字发送 0,第二和第三个传送字发送的坐标值与当前的坐标值不同,在将 ENABLE/RAP.STOP 端子置为 1 后,伺服系统会以极低的速度朝第二和第三个传送字发送的坐标值运行,而不会以 0 速停在原地。
当 ENABLE/RAP.STOP 端子为 1 时,不能发送回零指令,不恰当的操作会导致系统报警停机。
当①系统断电又重新上电,②系统报警停机复位,以及③对伺服系统作初始化配置后,系统内部的坐标系都会被更改,应重新做回零运行,建立正确的系统坐标系。
电磁干扰屏蔽安装要求
伺服控制器至伺服电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠紧固,大面积接地
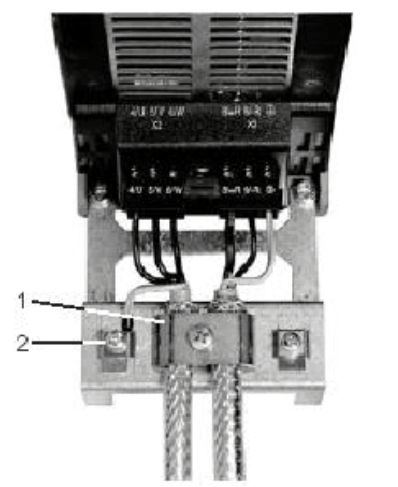
编码器线需采用专用带屏蔽层双绞线,并用金属夹将屏蔽层可靠紧固接地,屏蔽层从头至尾不应有断层。
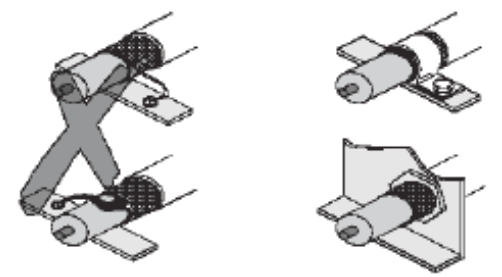


电磁干扰屏蔽处理不当:会出现总线易受干扰掉线;编码器脉冲信号接受错误,定位精度差;对电机进行零速控制时,电机会自行转动等故障现象。
资料下载
MOVIDRIVE® MDX60B / 61B 操作手册:https://download.sew-eurodrive.com/download/pdf/11300558.pdf
MOVITOOLS MotionStudio:https://www.sew-eurodrive.cn/os/dud/?tab=software&country=CN&language=zh_cn&search=MotionStudio
参考程序以及变频器备份:https://cloud.189.cn/t/EnQRr23QvQ7v(访问码:2g6b)










