台达ASDA-B3A-P系列伺服与西门子PLC通讯调试流程
调试软件及PLC控制系统
PLC:西门子1214C
伺服驱动器:台达ASDA-B3A-P
调试软件:ASDA_SOFT_V7.0.2.0
硬件连接
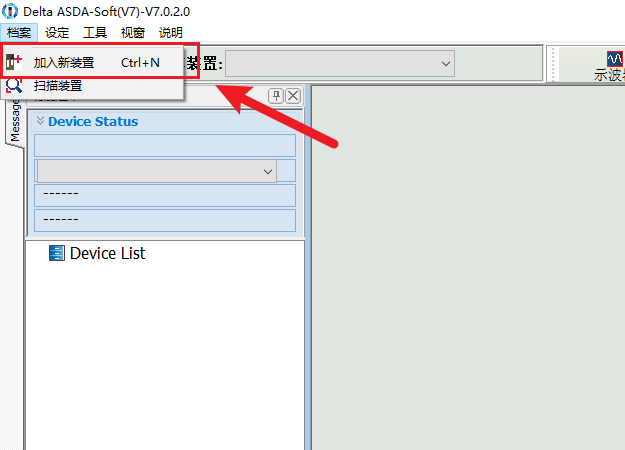
使用调试线缆连接伺服驱动器,并在调试软件中新增设备。
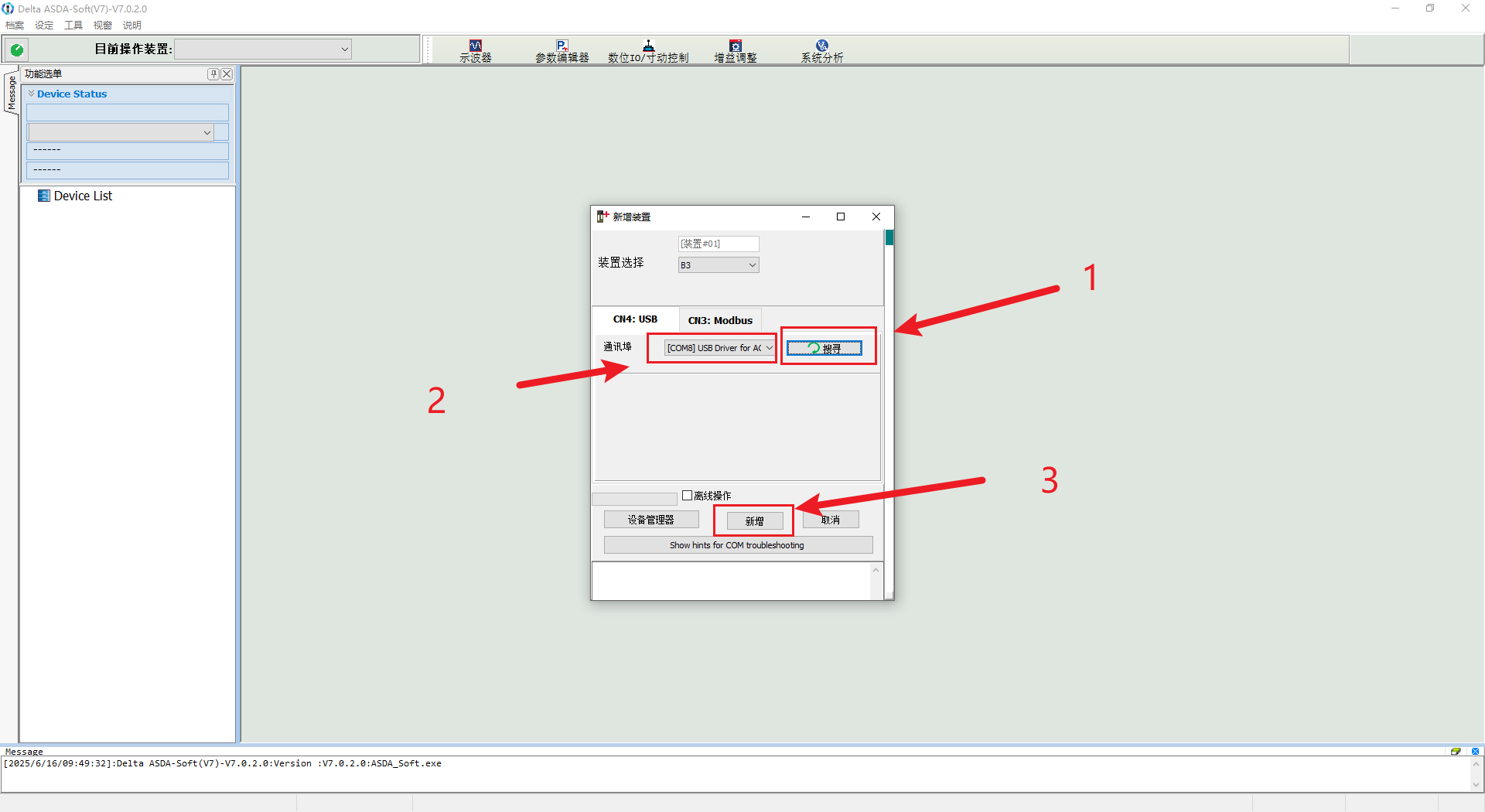
装置选择:B3,点击搜寻按钮,刷新设备;通讯设备选择如图显示,点击新增按钮,添加设备。
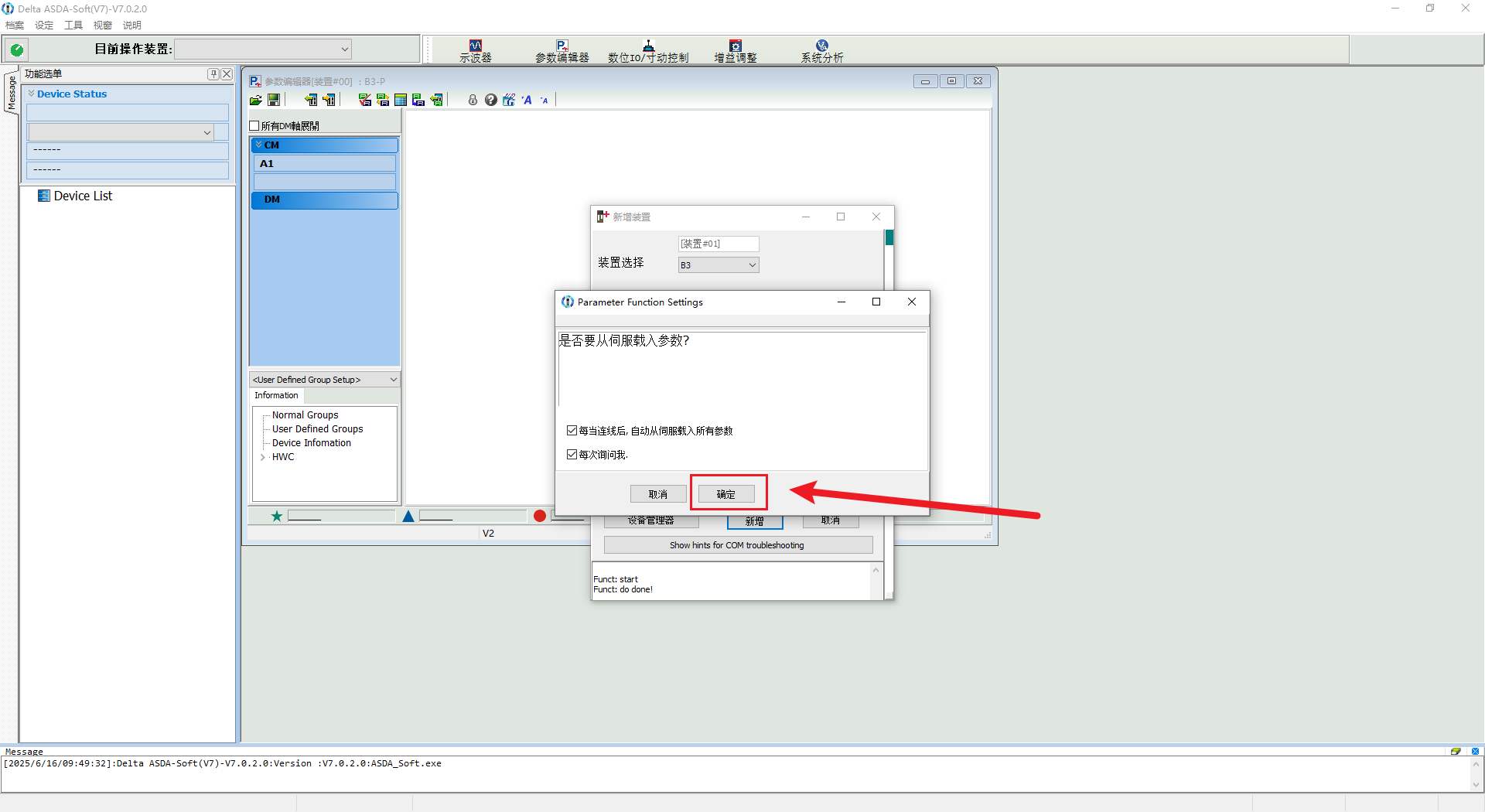
点击确认,载入伺服参数。
重置伺服参数
新增伺服驱动器推荐重置参数后,再开始设置参数,避免出现参数异常。
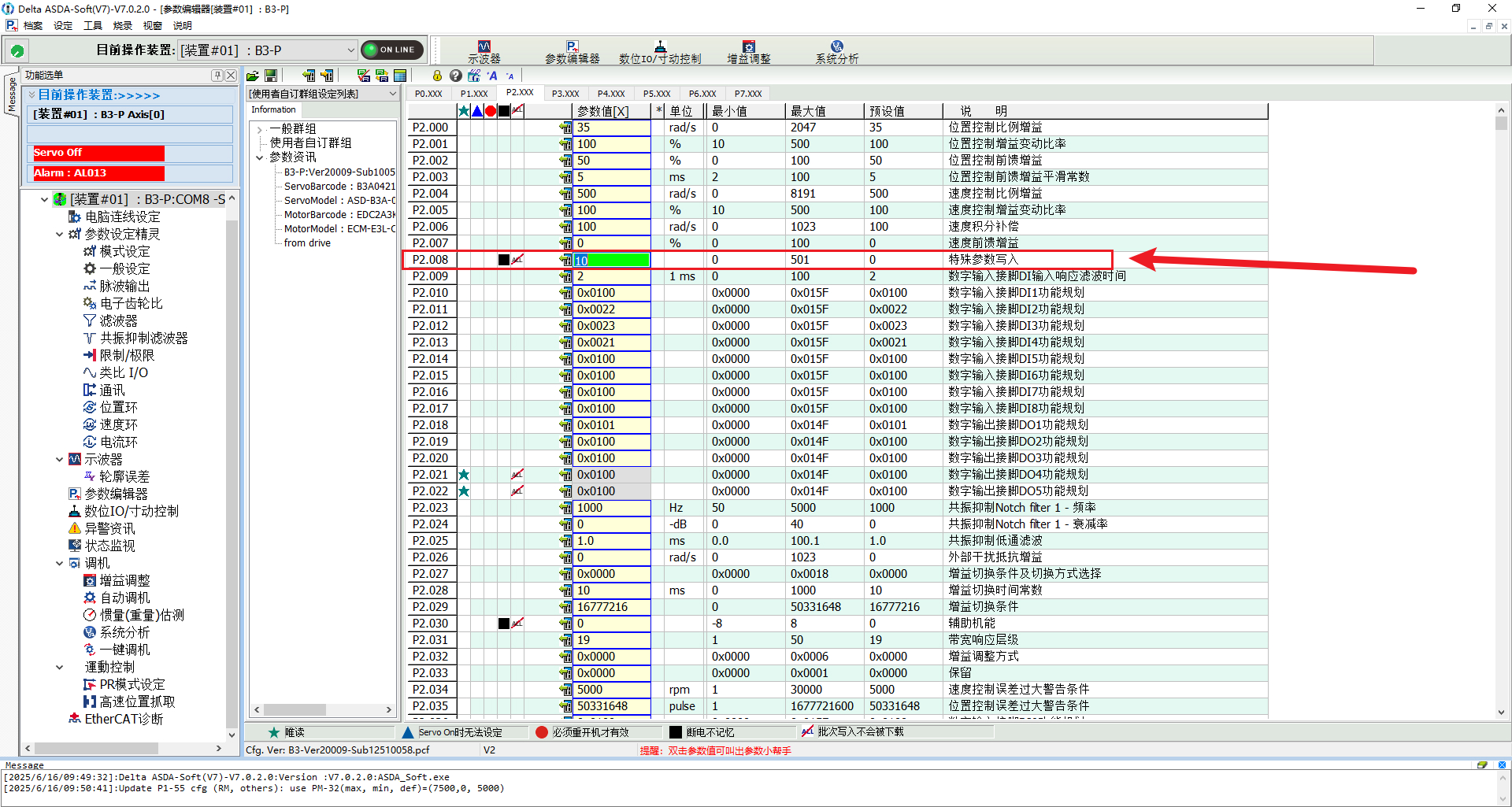
选择参数编辑器,并修改P2.008参数为10,即可重置伺服参数。
参数功能:
| 参数码 | 功能 |
|---|---|
| 10 | P0 ~ P7 群参数重置(重置后请重新上电) |
| 20 | P4.010 可写入 |
| 22 | P4.011 ~ P4.021 可写入 |
| 30、35 | 储存 Capture 的数据 |
| 271 | 先将 P2.069.X 设为 1 后并将伺服重上电以开启绝对型功能。 接着将 P2.008 设为 271,再将 P2.071 设为 0x0001,以建立絶对型原点坐标。 |
| 406 | 开启强制 DO 模式 |
| 400 | 在开启强制 DO 模式下,可立即切换回正常 DO 模式 |
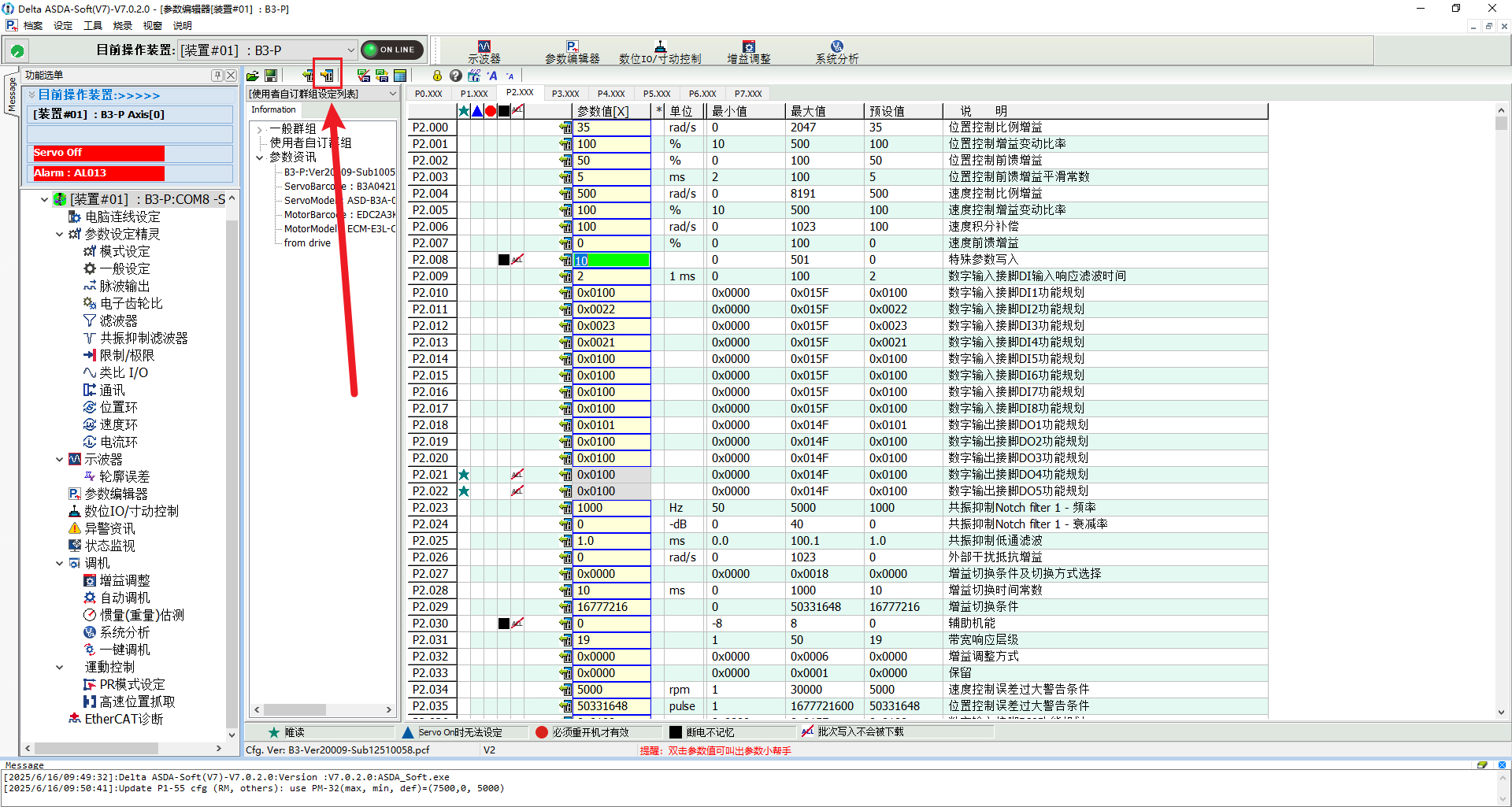
修改参数后,点击写入参数,并重启伺服驱动器。
伺服参数配置
重启伺服驱动器,并重新连接驱动器,然后打开参数编辑器。
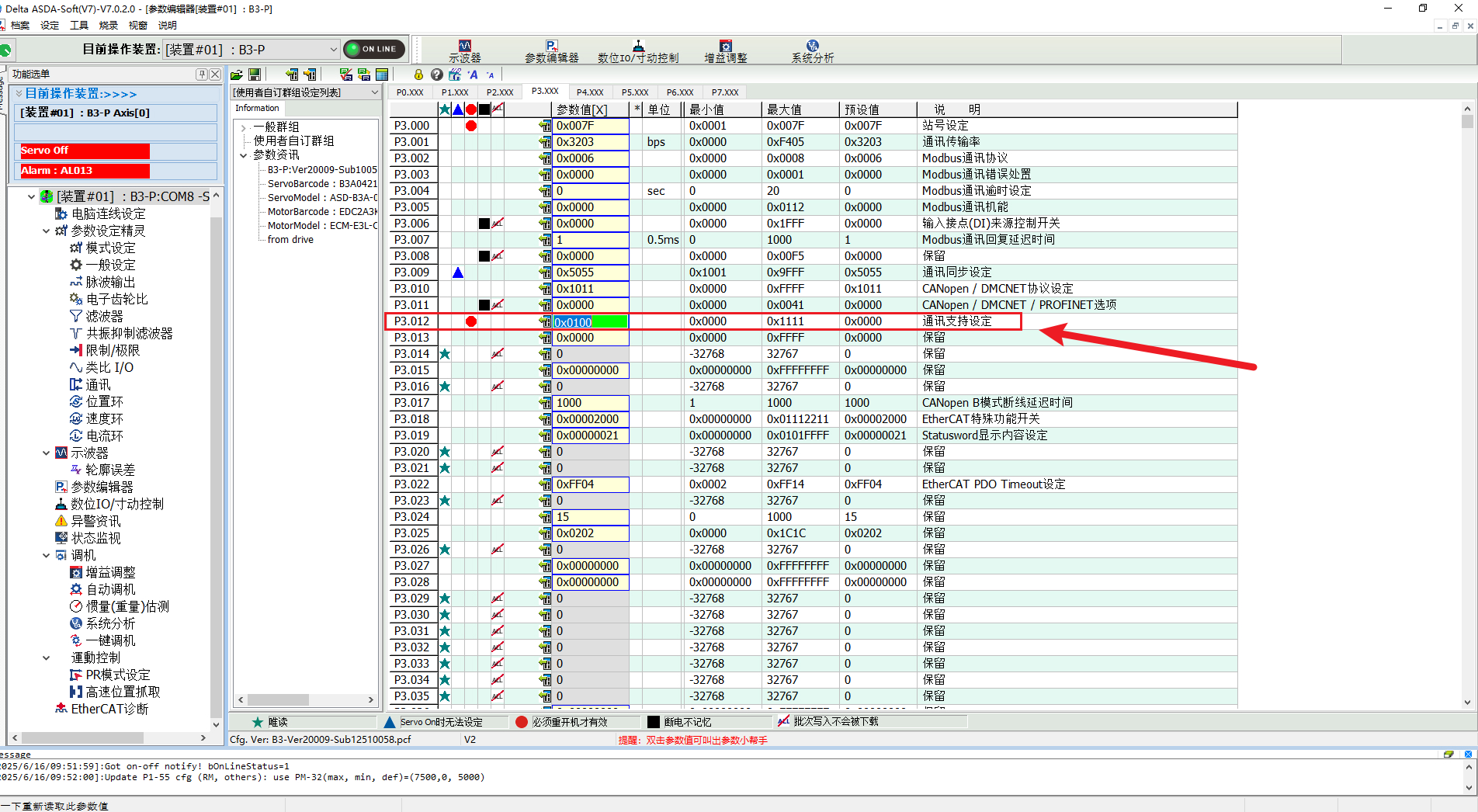
1、设置断电保持功能
修改参数P3.012为0x0100,使得相关参数可以在驱动器重新上下电或是进行通讯重置后,维持原本的设定值。
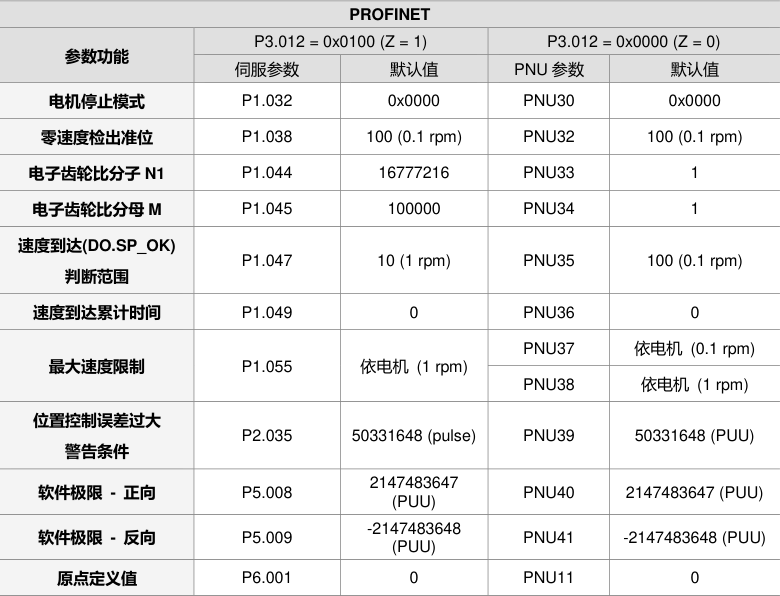
相关参数 - PROFINET:
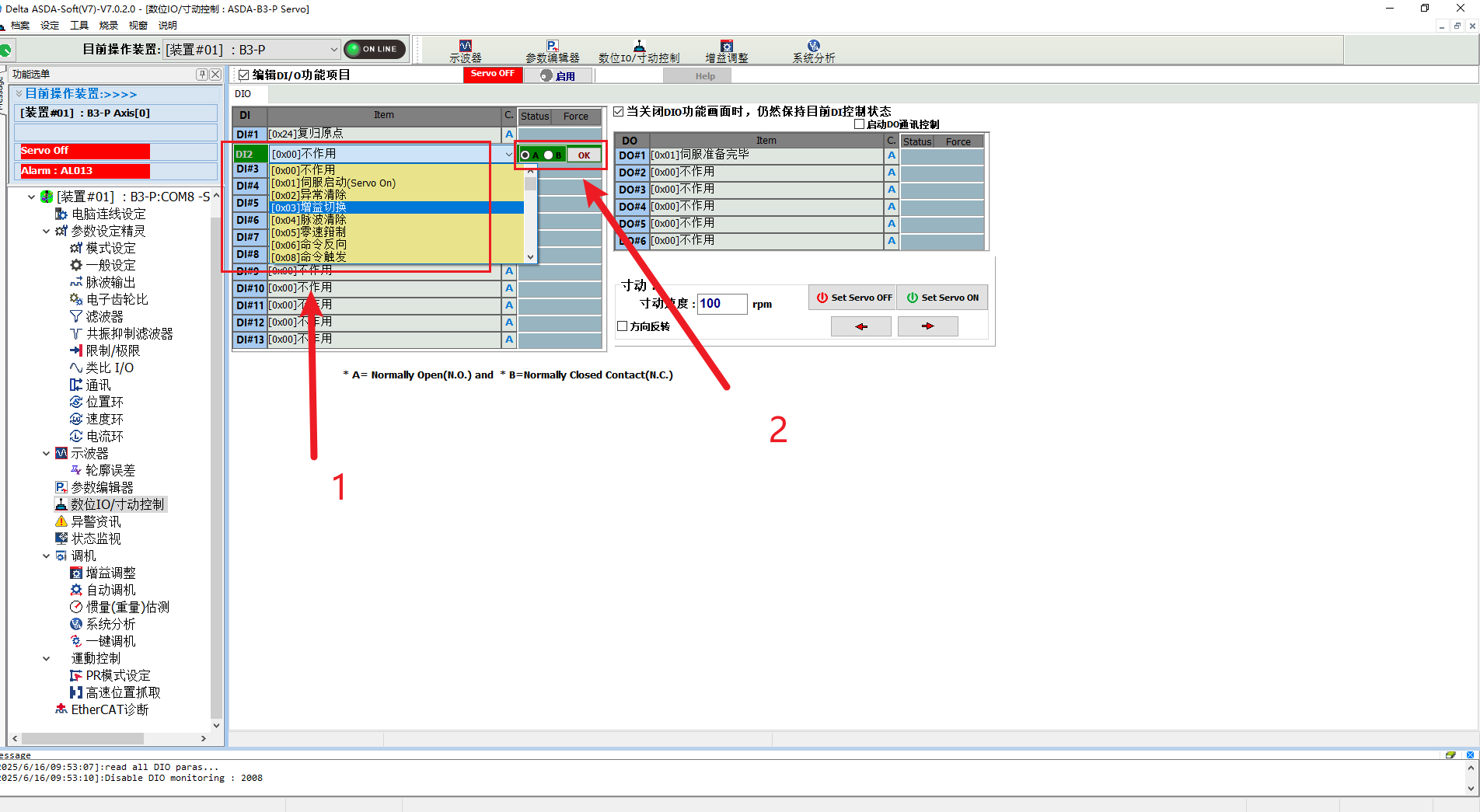
2、设置IO信号
点击数位IO/寸动控制,再点击编辑DI/O功能项目,设置驱动器IO信号。
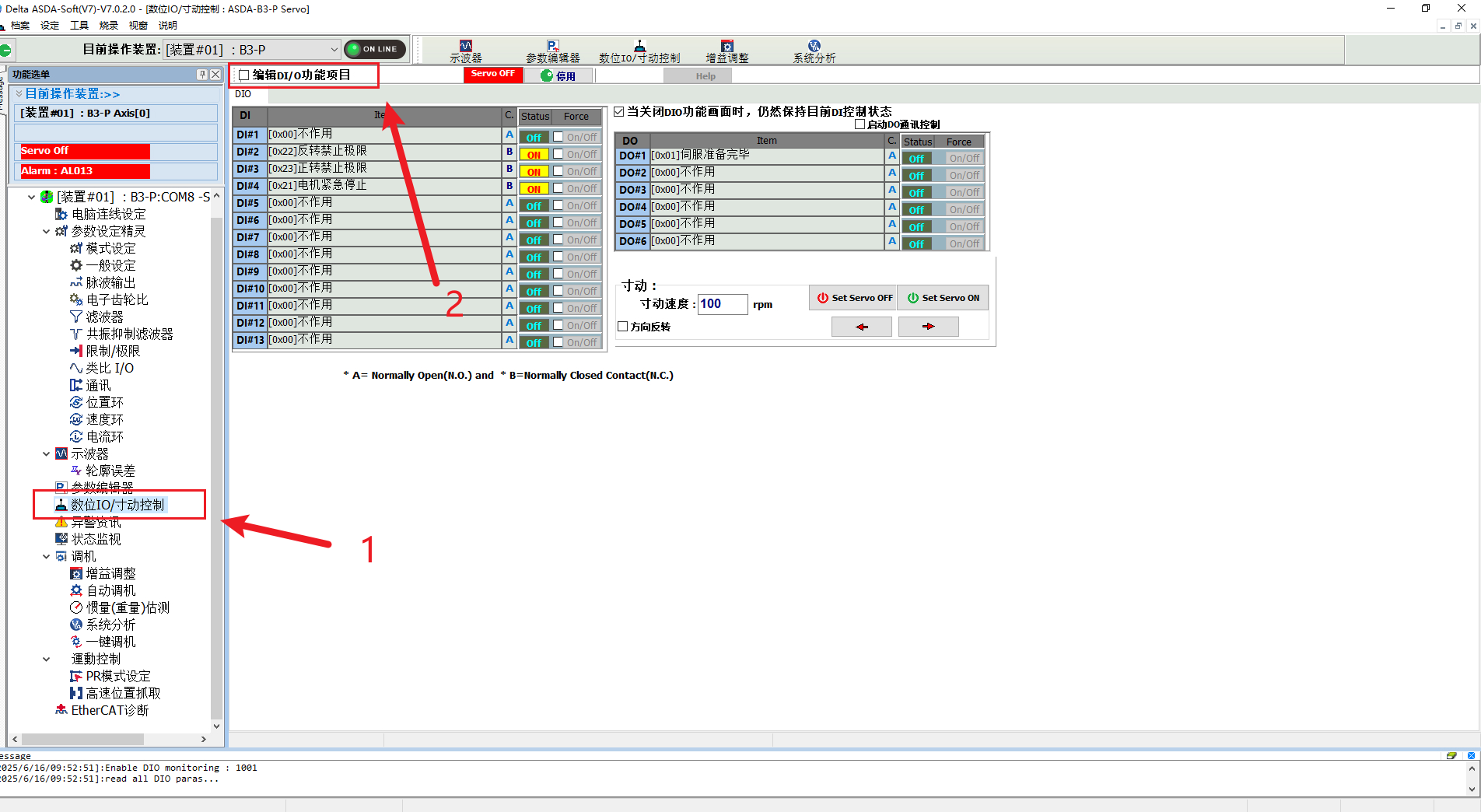
选择驱动器IO功能,以及常开常闭功能切换。
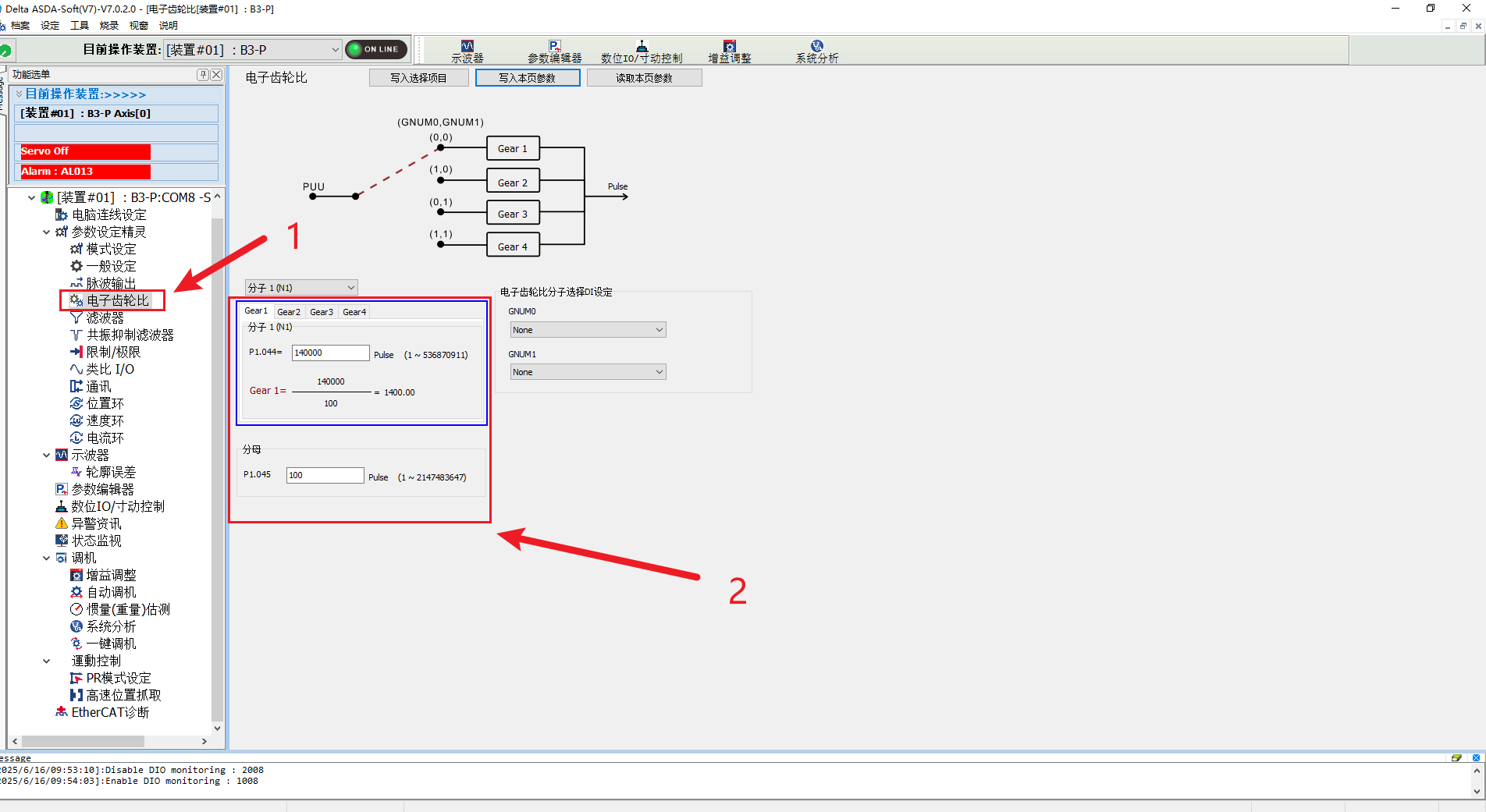
设置电子齿轮比
点击设置电子齿轮比,设置电子齿轮比分子分母,并写入参数。
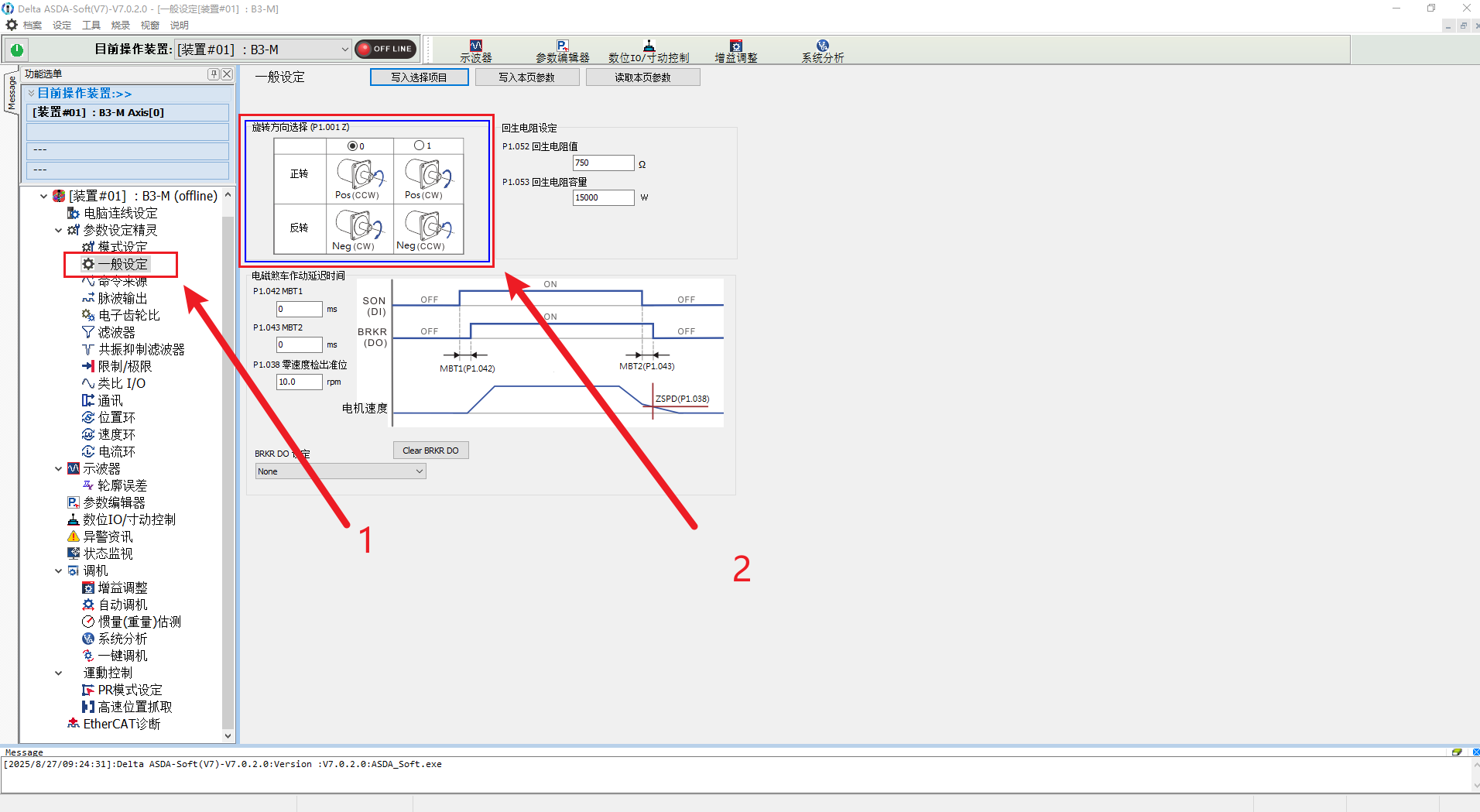
修改电机方向
在一般设定页面,可修改电机旋转方向。
西门子组态编程
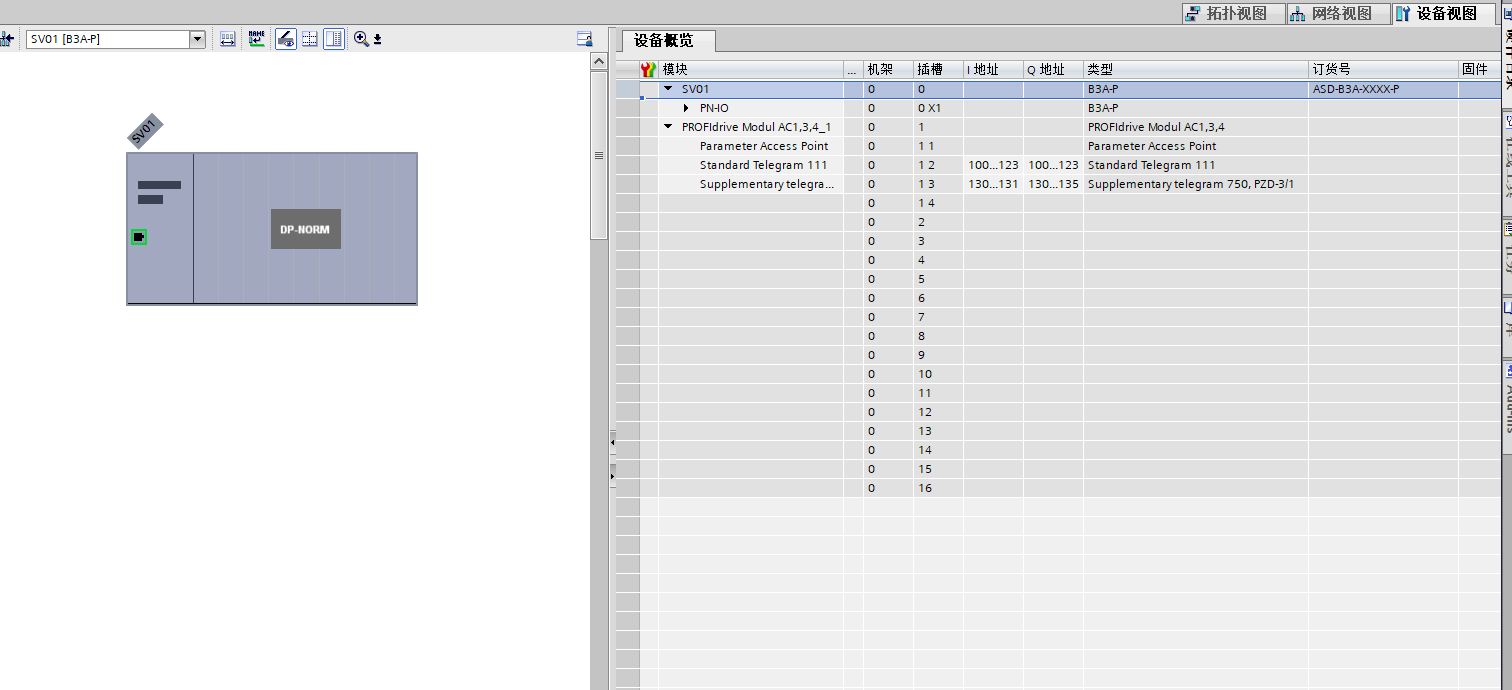
1、硬件组态
在博图中组态驱动器并分配IP。
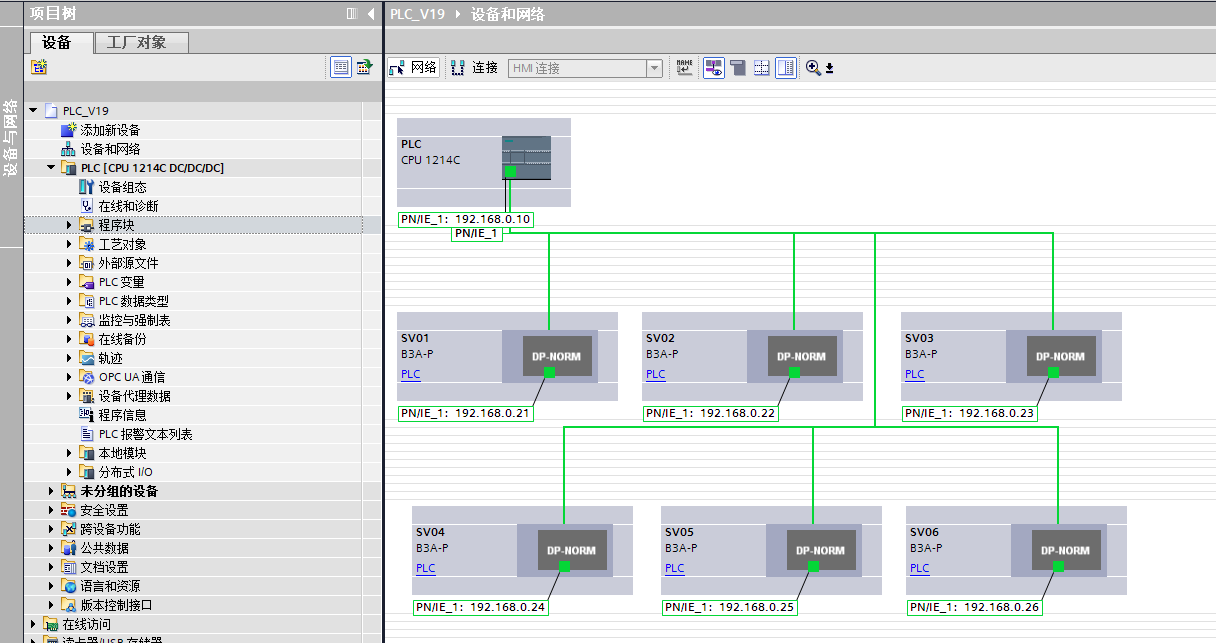
该示例组态111报文进行位置控制,并组态了750报文进行扭矩控制。
扭矩控制可根据实际需求删除。
2、编程控制
位置控制使用FB284功能块。
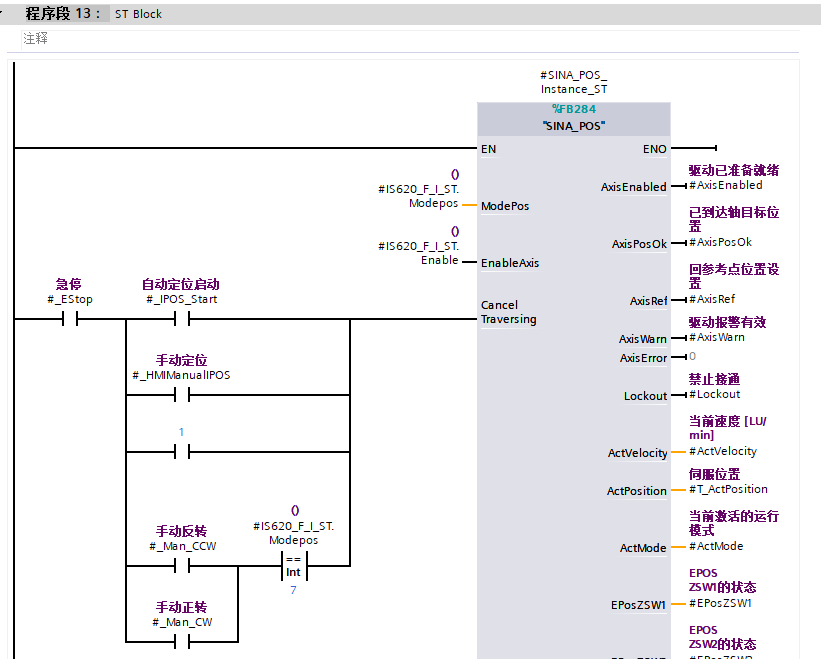
注意:该驱动器部分参数无法通过FB284写入,需通过SinaparaS功能块写入PNU参数
推荐PNU写入参数:
| 名称 | 功能 |
|---|---|
| PNU10 | 原点复归模式 |
| PNU11 | 原点偏移值 |
| PNU12 | 原点复归第一段速度 |
| PNU13 | 原点复归第二段速度 |
| PNU14 | 原点复归加/减速时间 |
| PNU23 | EPOS Jog 1 寸动速度 |
| PNU24 | EPOS Jog 2 寸动速度 |
| PNU43 | 最高加速度 |
| PNU44 | 最高减速度 |
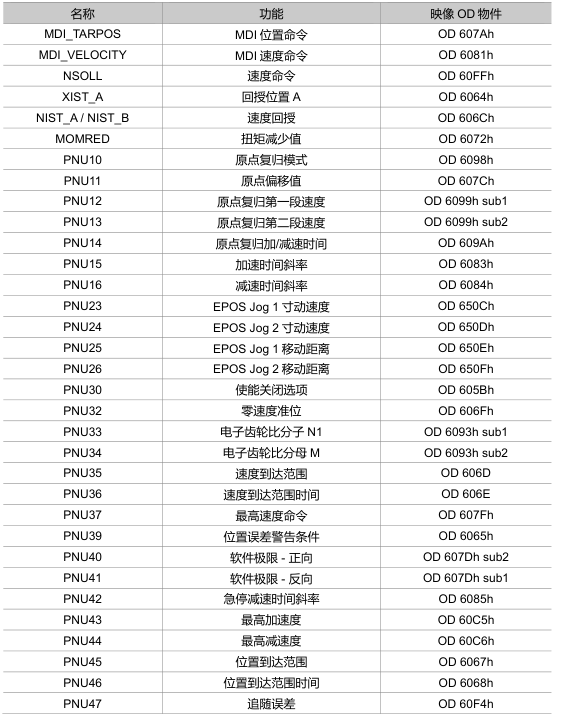
PNU参数一览:
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 与亓のBlog!
评论